
Disable vtx control betaflight что это
Обновлено: 05.07.2024
Тема раздела Мини и гоночные коптеры до 300мм в категории Квадрокоптеры и мультироторы; Спасибо за подсказки. Сам дебил. Начал разбираться с настройками. Движки стояли в реверсе. Будем настраивать дальше. Еще вопрос. Сильно греется .
Опции темы
Спасибо за подсказки.
Сам дебил. Начал разбираться с настройками. Движки стояли в реверсе.
Будем настраивать дальше.
Еще вопрос. Сильно греется разъем видео антены.
На большом коптере (Phantom), я такого не помню. Хоть на нем и стоя 2х ваттник.
Соглашусь! Т.к. мой коптер на раме Real1 (без усиливающих перегородок) без фильтров, начал лететь как в симуляторе, абсолютно предсказуемо и контролируемо. Есть совсем мелкий пропвош, но и то постараться надо. И уже просто моих навыков не хватает пока раскрывать его потенциал.
Но в то же время отмечу, что например свой 130й квадрик я пока нормально настроить не смог, с ним очень тяжело. Хотя там моторы у меня все гнуты кроме одного. И нужно делать выводы только поменяв на новые.
Вот и славно)) И кстати, это вторая по популярности пролема, после неправильного направления гиры в настройках)))
Другие руководства по прошивке Betaflight
Как только вы разберетесь с этим руководством, посмотрите и другие статьи/инструкции, они помогут вам разобраться с более продвинутым функционалом Betaflight.
Заключение
Это все базовые настройки Betaflight. Приятных полетов.
Запись опубликована 06.07.2018 автором Новиков Александр в рубрике Блог Оскара, Перевод, Руководства с метками Betaflight, начинающим. 4 комментарияКак поменять настройки видеопередатчика в Betaflight OSD или прямо с Тараниса : 2 комментария
спасибо ,,нигде нет обьяснений .кучу видео пересмотрел.теперь знаю как менять .
Кто-нибудь настраивал таким образов встроенный в полетник видеопередатчик FuriBee F4 v5 OSD ?
Настраиваем Betaflight : 4 комментария
Привет. Сделайте какой-то список известных проблем.
Например почему в программе не показывает, не работает аксерерометр и гироскоп. У меня например только барометр работает.
Как поменять настройки видеопередатчика в Betaflight OSD или прямо с Тараниса

Больше не нужно путаться с дип переключателями и кнопками!
Все становится намного проще благодаря тому, что параметры видеопередатчика можно менять удаленно, используя аппаратуру управления. Возможно это звучит не очень круто, но после того, как я попробовал эту штуку пару раз, то был ошарашен тем, как это удобно, и теперь я всем настоятельно рекомендую попробовать!
Управление видеопередатчиком полезно, например, во время гонки и если вы упали, тогда можно включить режим PitMode на видеопередатчике не ломясь к квадрику. Это минимизирует помехи другим пилотам, и теоретически защищает передатчик от перегрева из-за недостаточного охлаждения.
Настройки в Betaflight
Сохраняем настройки (кнопка Save), контроллер должен перезагрузиться.
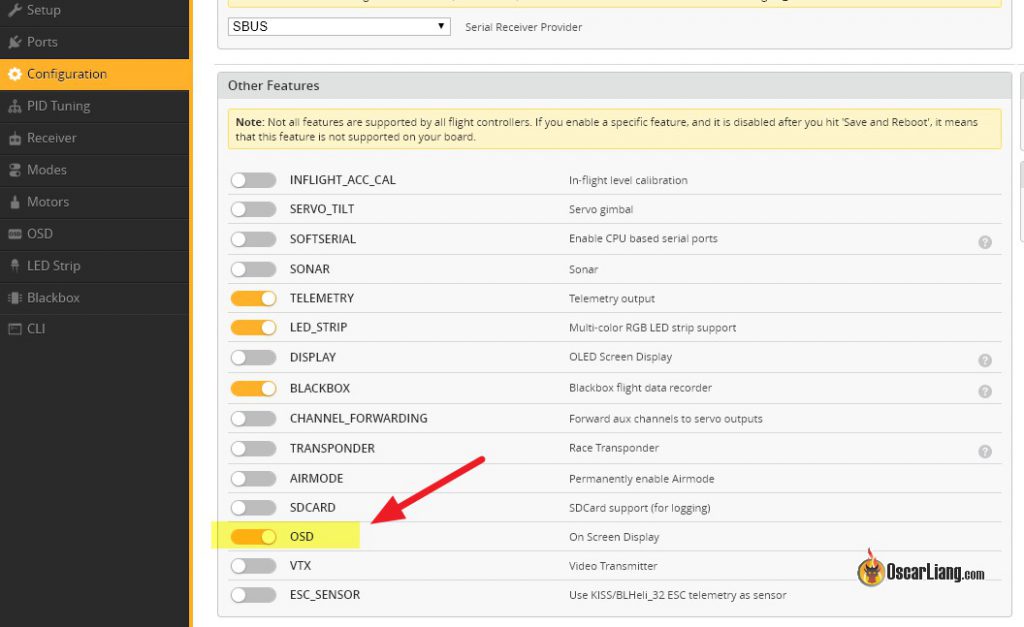
Теперь переходим на вкладку Configuration, и включаем OSD. Если вы новичок, то вот руководство по использованию Betaflight OSD.
Сохраняем настройки (Save), на этом всё. Теперь у вас должен быть доступ к Betaflight OSD и вы сможете увидеть настройки видеопередатчика.
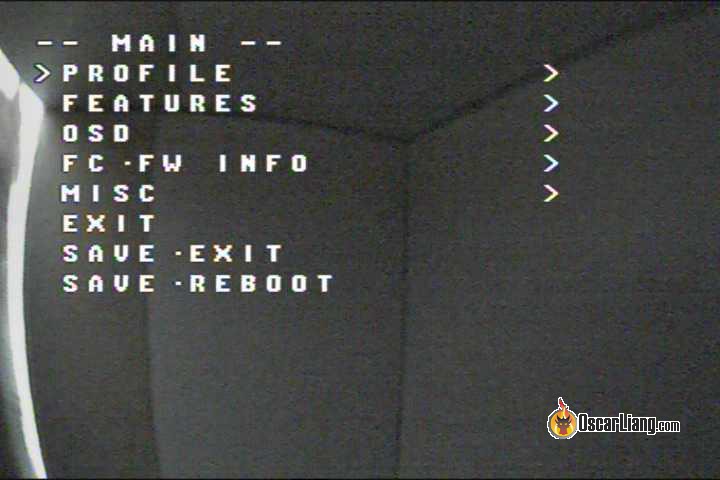
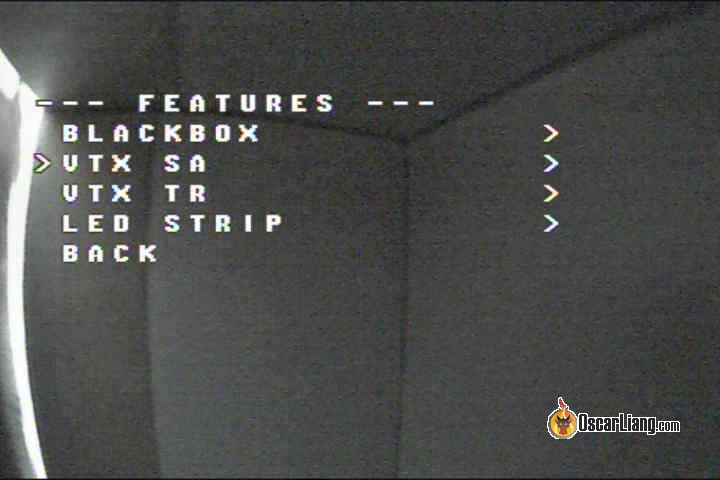
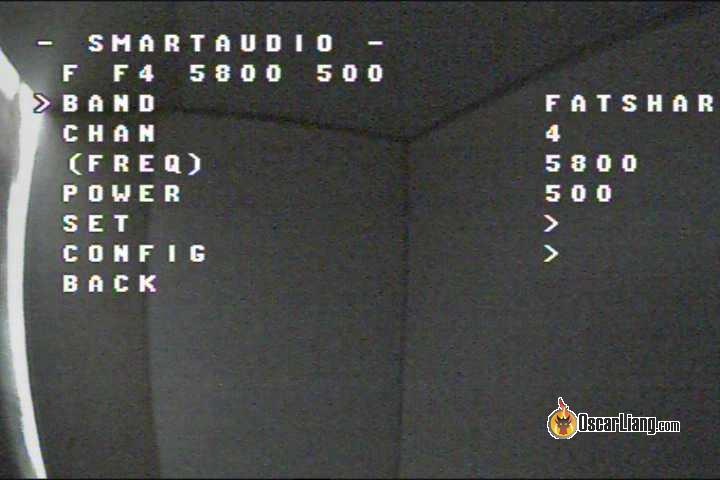
На этом экране вы должны видеть настройки видеопередатчика.
Если данные не отображаются, тогда что-то не так с подключением или с настройками порта. Попробуйте другой последовательный порт. Если ничего не помогло, тогда можно попробовать программную эмуляцию последовательного порта (SoftSerial).
Подключение
Нужно подключить всего один проводок!
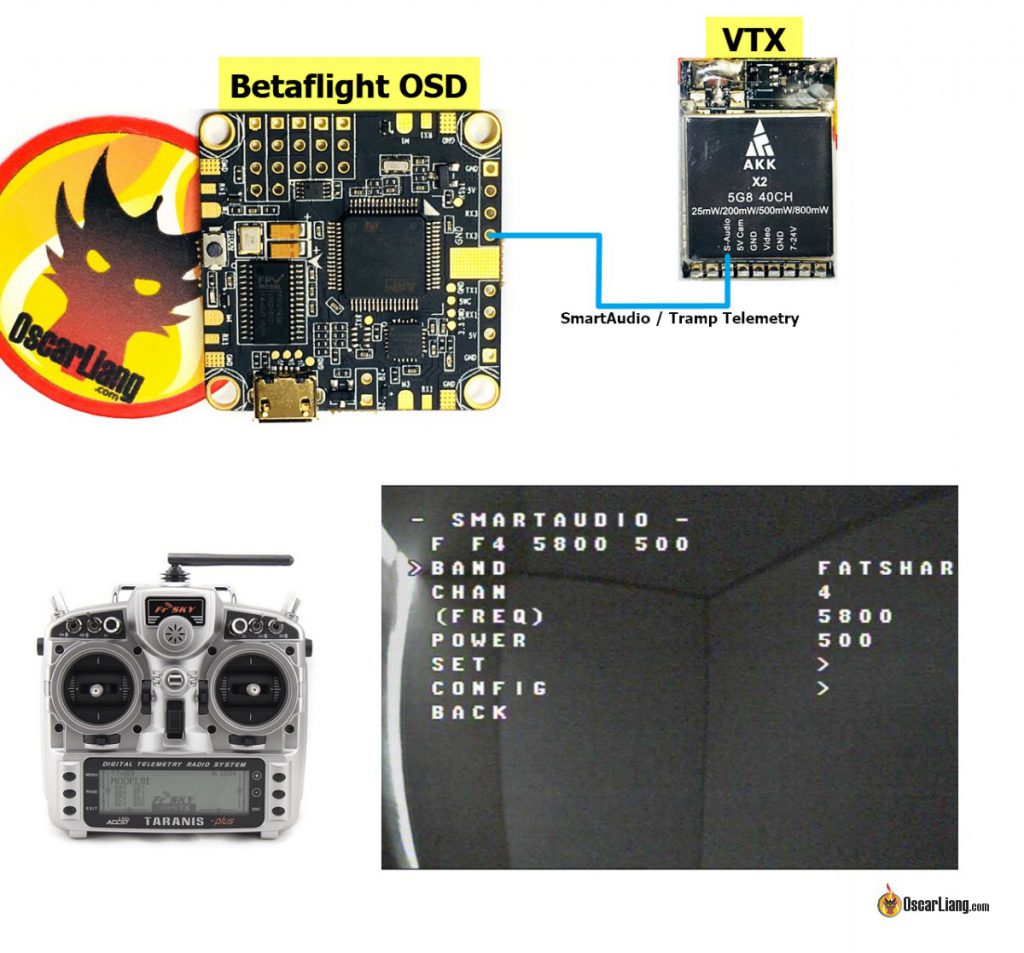
Пример подключения Betaflight F4 FC и AKK X2 VTX
Настройка Betaflight для первого полета
Тут мы пройдемся по основным параметрам Betaflight, необходимым для первого полета.
Важно! Снимите все пропы с коптера прежде чем начинать настройку!
Подключаем Micro USB кабель
Подключенный MicroUSB кабель питает полетный контроллер.

Вкладка Setup
Вы должны увидеть вкладку Setup сразу, как только подключитесь к полетному контроллеру.
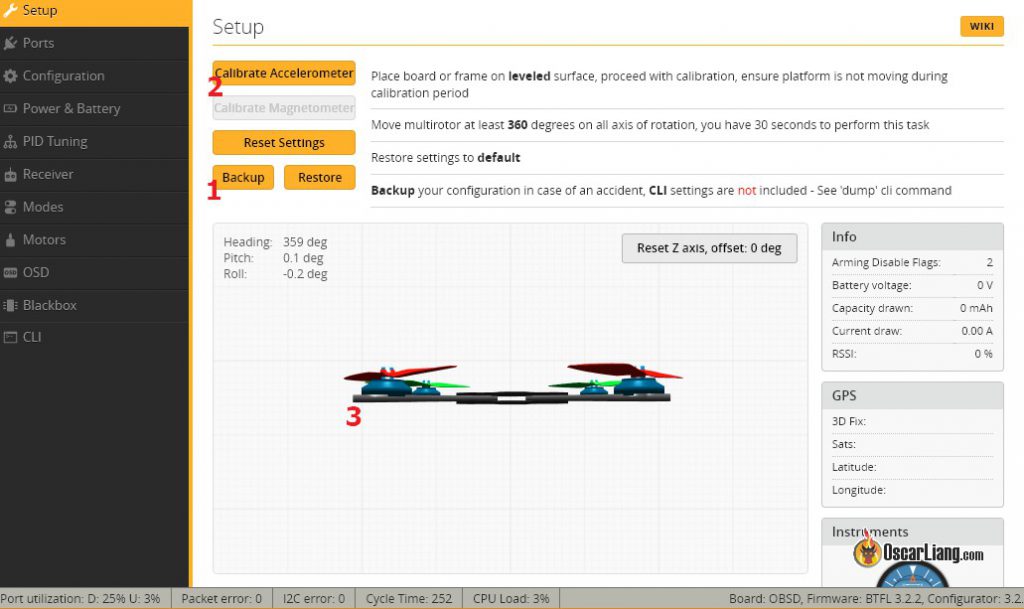
- Прежде чем менять настройки, сделайте резервную копию.
- Поставьте коптер на ровную горизонтальную поверхность, и откалибруйте акселерометры (см. картинку).
- Покрутите коптер в руках, 3Д модель должна вращаться так же, как и коптер
Если 3Д модель не двигается или двигается не так как коптер, тогда скорее всего полетный контроллер установлен не той стороной (обычно на плате есть стрелка, которая должна указывать вперед). В этом случае можно повернуть плату на коптере или задать YAW offset на вкладке Configuration (обычно это углы 90, 180 или 270 градусов).
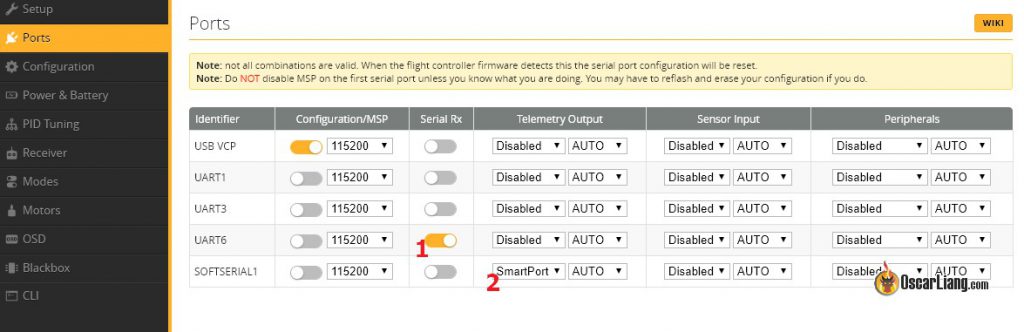
Вкладка Ports
Вкладка Configuration
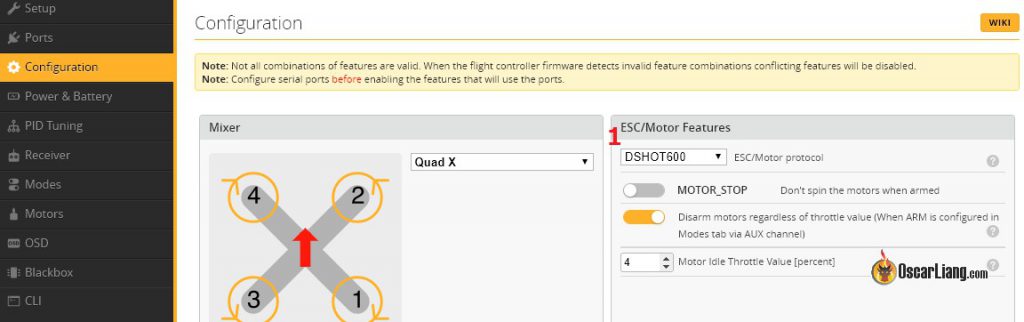
Остальные параметры можно не трогать и оставить значения по умолчанию.
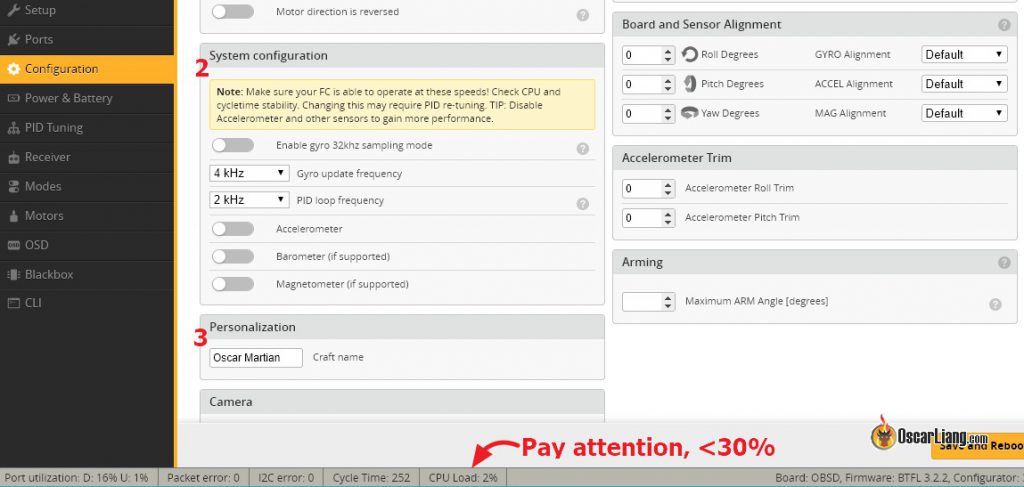
2. Раздел System Configuration
Потом поэкспериментируете и выберете наиболее подходящие значения, жестких правил по их выбору нет.
При смене значений этих параметров обратите внимание на CPU load (загрузка процессора) внизу экрана, старайтесь держать это значение меньше 30%. Если значение будет выше, то полетный контроллер может работать нестабильно.
Отключите Barometer и Magnetometer, они нам не нужны, т.к. мы летаем на миникоптере.
3. Раздел Personalization
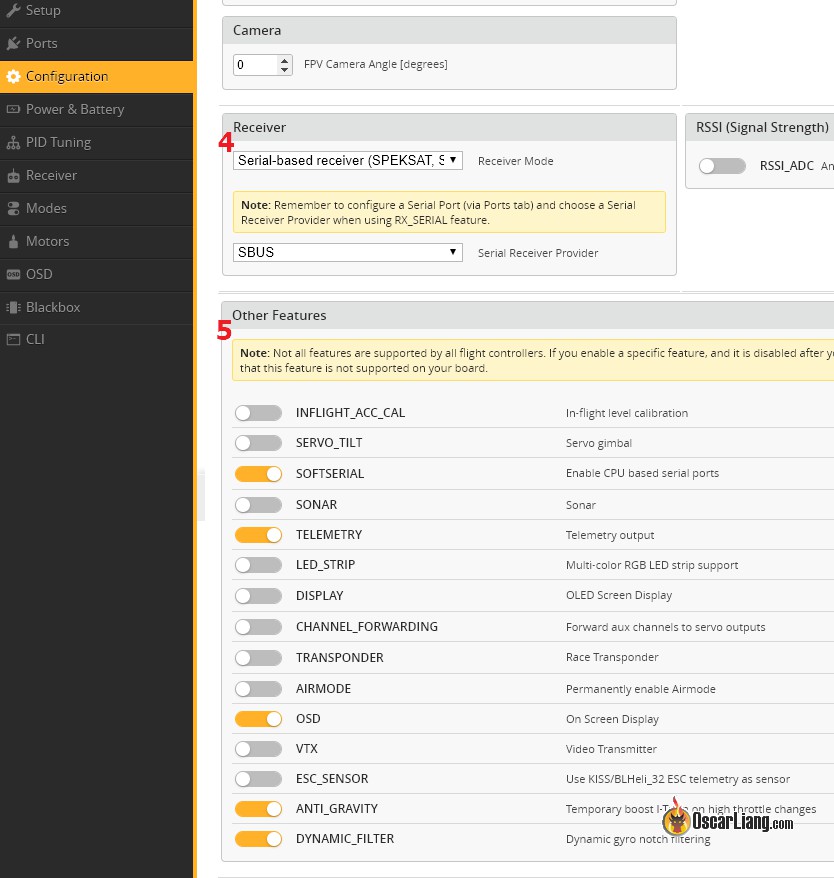
4. Раздел Receiver
Если приемник использует PPM, тогда выберите PPM RX Input в списке Receiver Mode.
5. Раздел Other Features
Обычно я включаю нижеуказанные функции Betaflight. Если вы не уверены в том, нужны ли они, просто оставьте значения по умолчанию, они не помешают первому полету.
- Anti-Gravity
- Dynamic Filter
- Telemetry (чтобы работала SmartPort телеметрия)
- OSD (если ваш ПК поддерживает Betaflight OSD)
Нажмите Save & Reboot.
Вкладка Receiver
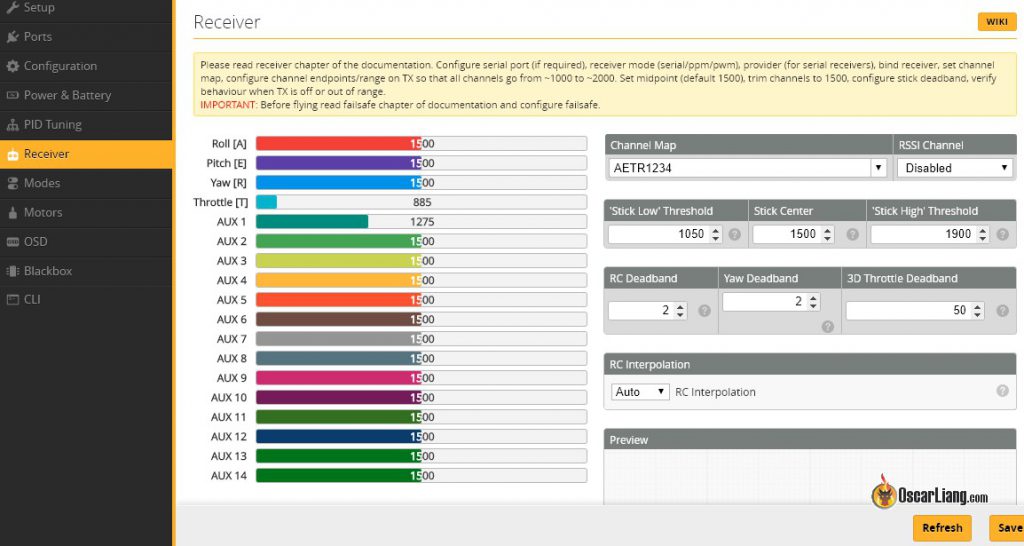
Тут мы проверяем, что приемник работает правильно.
Если ни один из каналов не работает, тогда начинаем искать проблему:
- приемник привязан к передатчику (забинден)? На приемнике должен гореть зеленый светодиод
- приемник правильно подключен/припаян к полетному контроллеру?
- уверены, что Serial RX включили на нужном порту?
- уверены, что правильно выбрали протокол?
После того как убедитесь, что все каналы работают правильно, проверьте значения в средних и крайних точках в первых четырех каналах (Pitch, Roll, Yaw, Throttle, т.е. тангаж, крен, рысканье и газ). В центральном положении эти каналы должны иметь значение 1500, а крайние значения 1000 и 2000.
Если у вас другие значения, тогда читайте вот это руководство по настройке центральных и конечных точек.
Вкладка Modes
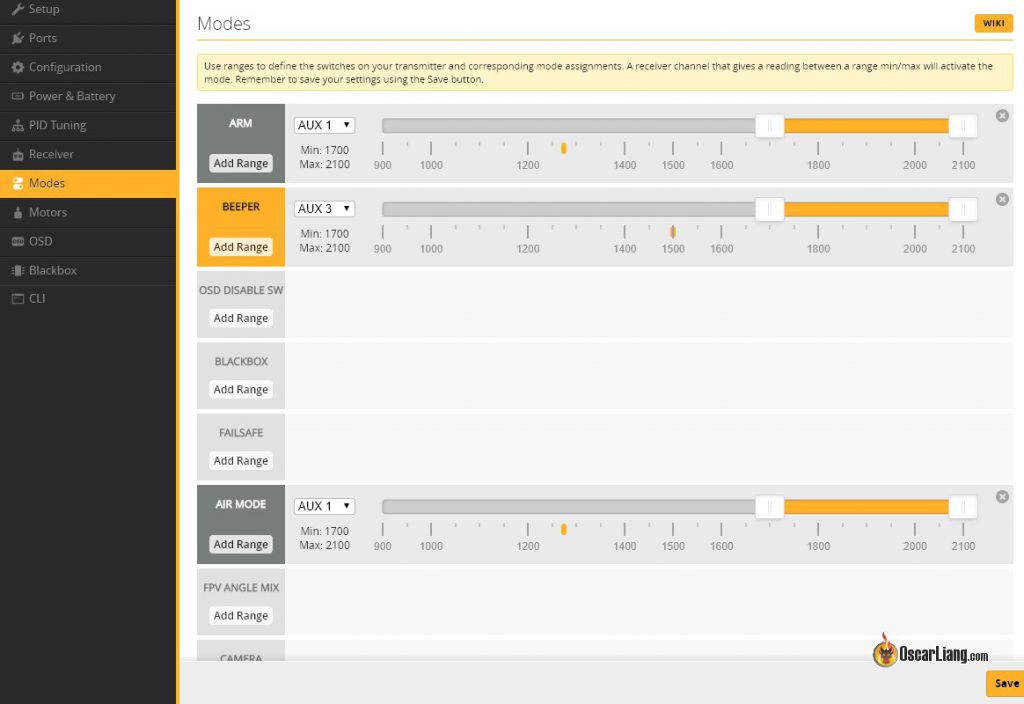
Тут мы настраиваем полетные режимы и их активацию при помощи дополнительных (AUX) каналов управления (тумблеры на аппаратуре управления):
- Arming (арминг, включение коптера/моторов)
- Airmode (управляемость коптера при 0 значении газа)
- Angle mode (режим полета без автовыравнивания)
- Beeper (пищалка)
Я предпочитаю активировать Airmode тем же тумблером что и арминг коптера, а не отдельным, но это дело вкуса.
Вкладка Motors
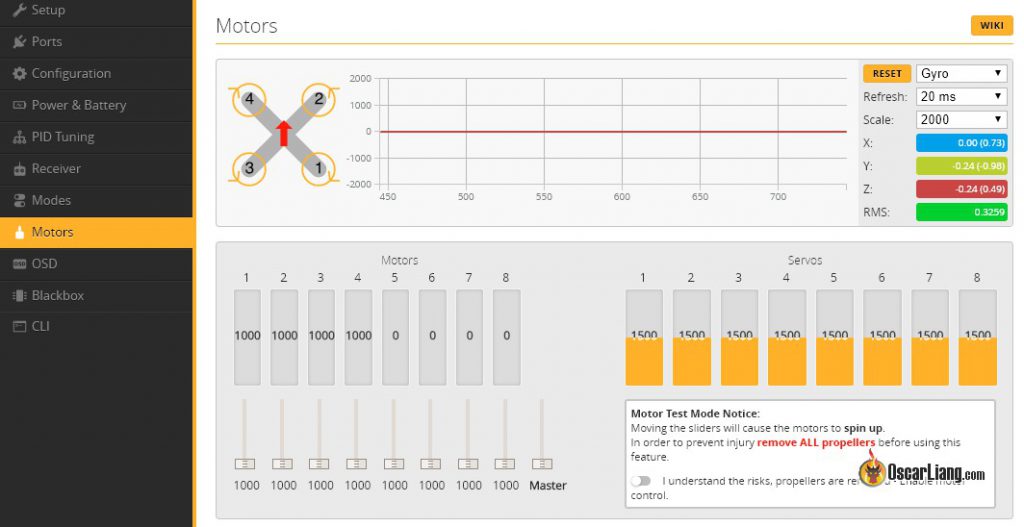
Проверим порядок моторов:

Если у вас другой порядок моторов, тогда его нужно поменять при помощи переназначения ресурсов (Resource Remapping).
Теперь проверьте направление вращения моторов, его можно поменять в BLHeliSuite.
Вкладка OSD
Вкладка PID Tuning
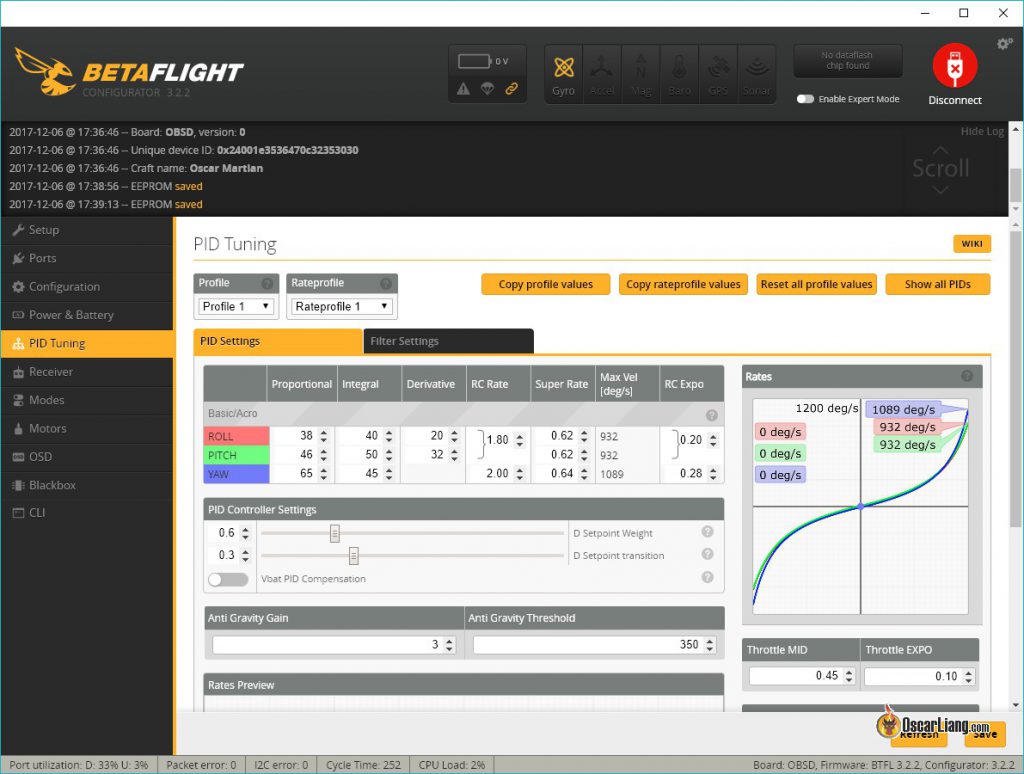
Для первого полета здесь ничего менять не нужно. Но настройка ПИД коэффициентов и рейтов может помочь летать лучше.
Настраиваем Betaflight

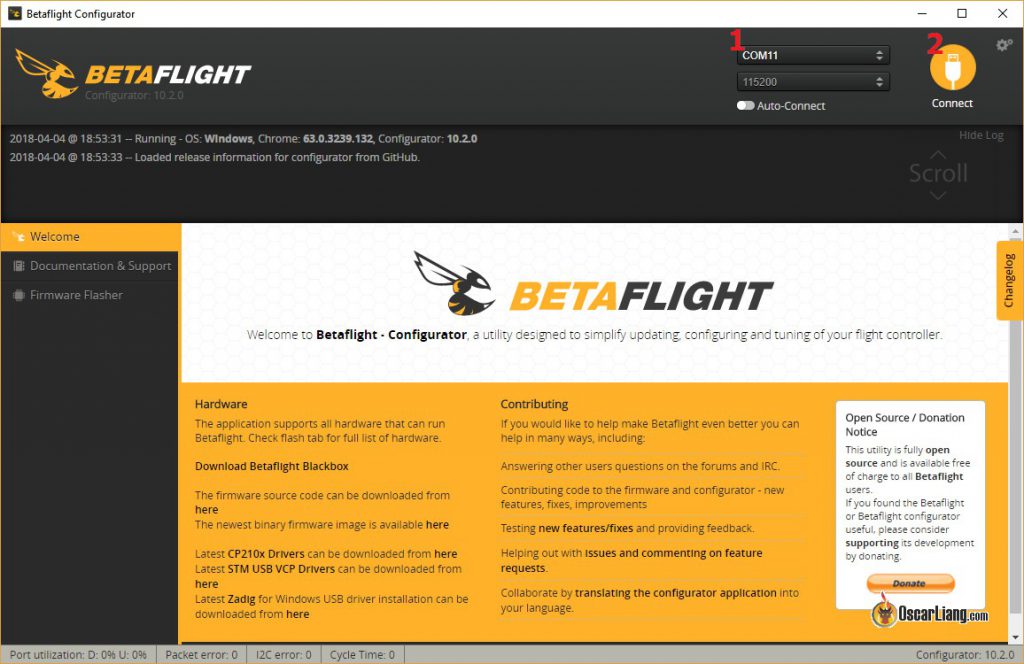
В этом руководстве я покажу вам как сделать первоначальную настройку Betaflight. Для начала вам нужно будет нужно скачать конфигуратор и подключить полетный контроллер к компьютеру при помощи USB кабеля. Затем мы пройдем все необходимые шаги по настройке с самого начала и до первого полета.
Ниже я покажу простые шаги по настройке вашего первого коптера, достаточные для того, чтобы поднять его в воздух.
Прежде чем начать
Чтобы сделать это руководство наиболее простым, я подразумеваю, что у вас есть вот это железо:
- Приемник FrSky с SBUS и SmartPort телеметрией
- Полетный контроллер на процессоре F3 или F4 с прошивкой Betaflight 3.2 или новее
- Регуляторы скорости, которые поддерживают протокол DShot
Прежде чем мы начнем, скачайте Betaflight Configurator. Вот список шагов, так сказать краткое содержание, согласно используемым вкладкам в приложении:
Видеопередатчики, которые поддерживают удаленное управление
Есть несколько разных протоколов управления видеопередатчиками, они позволяют менять настройки как с аппаратуры управления, так и через Betaflight OSD.
Dzen1
При отпускании стиков в режимах Angle и Horizon коптер будет автоматически выравниваться, используя как гироскопы, так и акселерометры. Новичкам в этих режимах летать проще. В режиме Horizon можно делать флипы и ролы, а в режиме Angle — нельзя, тут углы ограничены в 45 градусов (настраивается).
В любом случае, Acro — это самый главный полетный режим для фристайла и гонок. Новичкам я настоятельно рекомендую начать его использовать как можно раньше.
Вот статья с описанием различий этих режимов, и объяснение, почему стоит использовать Acro режим (англ).
Что такое режим Acro?
Возможно вы уже заметили, что режима Acro нет на закладке Modes. Это потому, что Acro режим автоматически включается, когда вы армите коптер. Однако, он может быть переопределен другим режимом, например, Horizon или Angle, когда они активируются.
Исчезли режимы Angle и Horizon
Если режимы Angle и Horizon недоступны на вкладке Modes, это значит, что в Betaflight отключен акселерометр. Некоторые отключают аксели, т.к. летают только в акро- режиме, а отключение акселерометров освобождает процессор от некоторых ненужных задач. Вы можете включить акселерометры на вкладке Configuration.
Щелкаем тумблером на аппе и пищалканачнет издавать звук (если она конечно установлена). Это поможет вам найти упавший дрон. Кроме пищалки можно настроить регули, чтобы они издавали писк двигателями (функция ESC beacon), это независимая от пищалки функция, пригодится как запасной вариант, на случай отказа пищалки.
Airmode — это не полетный режим, это функция, которая улучшает управляемость коптера при нулевом газе. Но её использование может привести к неожиданным ускорениям моторов, когда коптер стоит на земле, так что будьте осторожны.
Этот режим действительно доступен ещё и как фича/функция, так что если её включить на вкладке Configuration, то она исчезнет со вкладки Modes. Преимущество использования вкладки Modes в том, что вы сможете включить/выключить Airmode прямо в полете.
Anti-Gravity
Антигравитация — это не полетный режим, это фича. Её активация уменьшает «провалы» при резком изменении газа, путем увеличения I-коэффициента ПИД регулятора.
То же что и в случае с Airmode, если вы включили её на вкладке Configuration, то она исчезнет на вкладке Modes.
Blackbox Start/Erase
В принципе название говорит само за себя — начало и остановка записи логов в черный ящик (Blackbox).
Camera Control
Не часто используется, обновлю информацию позже.
OSD Disable SW
Отключает Betaflight OSD, т.е. текст пропадает с экрана.
При использовании тумблера для арминга можно случайно им щелкнуть и запустить моторы, а это может быть опасно. Pre-Arm — это еще один дополнительный шаг для арминга.
Можно настроить этот режим на ещё один тумблер, и тогда вы сможете заармить коптер, только если и этот выключатель включен. После арминга тумблер можно отщелкнуть, т.е. тумблер без фиксации отлично подойдет.
Flip Over After Crash
Если после падения коптер лежит вверх ногами, то можно использовать этот режим чтобы «перевернуть» коптер и, возможно, заново взлететь. Переворот выполняется за счет вращения моторов с одной стороны в обратном направлении, и для этого требуется использование протокола DShot.
Также известен как Turtle Mode — режим черепахи.
VTX Pit Mode
Если есть SmartAudio или Tramp Telemetry, то активирует PitMode видеопередатчика. Pitmode — это режим в котором мощность видеопередатчика близка к 0. Полезно в случае аварии, так вы минимизируете шанс помешать другим пилотам.
Ручная активация фэйлсейва (англ), без необходимости ждать пока пропадет связь
Как менять настройки видеопередатчика прямо с Тараниса, при помощи LUA скрипта
Для того чтобы управлять видеопередатчиком с Taranis нужно:
- Подключить оборудование как описано ниже
- Настроить LUA скрипты в Таранисе; вот подробное руководство по настройки LUA в Betaflight
- Настроить SmartPort телеметрию
На диаграмме ниже показана схема соединения:
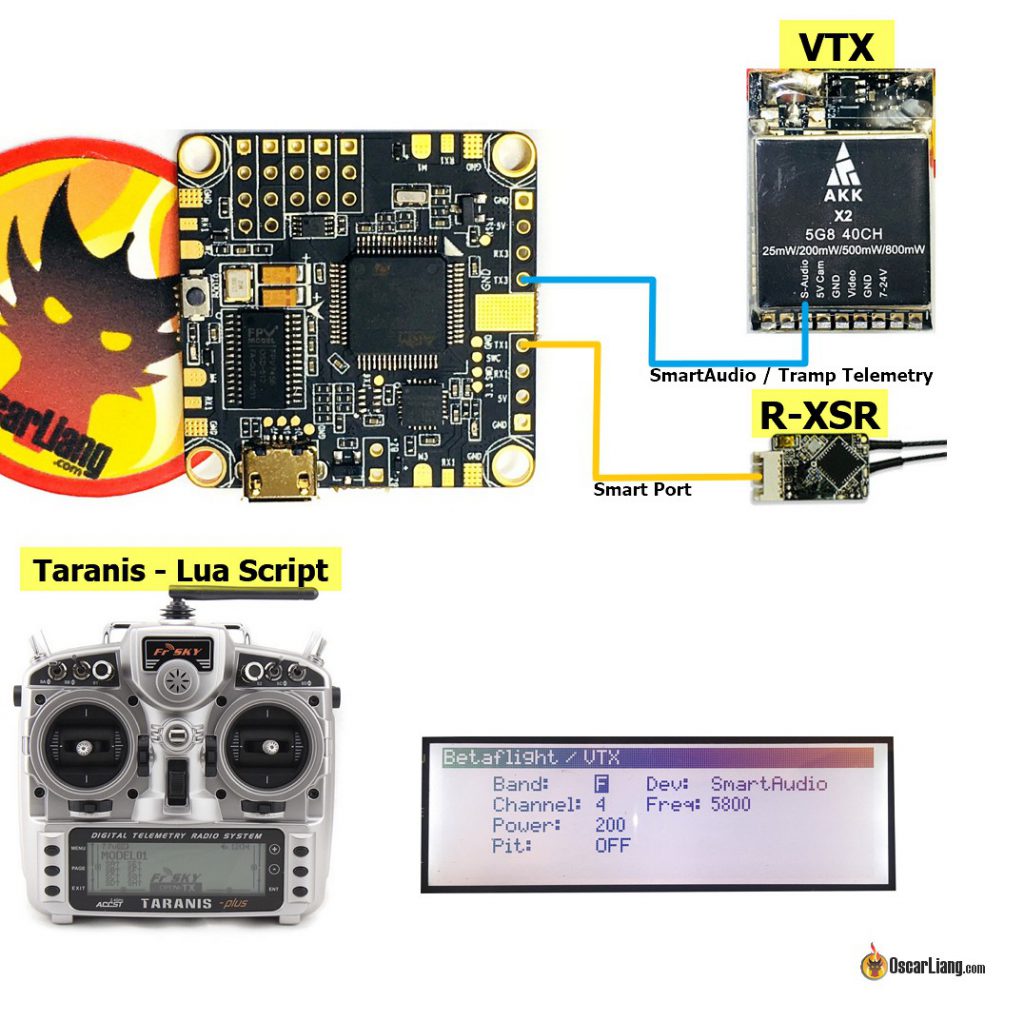
Пример соединения Betaflight F4 FC, R-XSR и видеопередатчика AKK X2
Теперь должна появится возможность менять настройки видеопередатчика, PID, рейты, прямо с Тараниса, правда удобно?
Не работает?
Если вы не видите страницу VTX в LUA скриптах, но видите страницы PID и Rate, тогда что-то не так с подключением по SmartAudio/ TrampTelemetry или с настройками порта для них. Можно проверить работает ли управление через Betaflight OSD.
Если ни одна из страниц LUA скриптов не видна (VTX, PID, Rate), тогда проблема с LUA скриптами в Таранисе. Если вы используете приемник R-XSR, то нужно обновить прошивку (201710хх), в которой исправлен баг с LUA скриптами (вот руководство по обновлению прошивок в приемниках FrSky). Также попробуйте использовать другой порт или SoftSerial.
Запись опубликована 08.11.2017 автором Новиков Александр в рубрике Блог Оскара, Перевод, Руководства с метками vtx, видеопередатчик, продвинутым. 2 комментарияОграничение
Поэтому управление прямо с Тараниса будет удобнее (при помощи LUA скрипта), и вы сможете менять настройки вне зависимости от того, какой канал сейчас активен.
Читайте также: