
Remotetech ksp гайд
Обновлено: 05.07.2024
Такое решение было навеяно ещё и желанием воспроизвести, в некотором смысле, советскую космическую программу. А она, как известно, полагалась больше на автоматику, чем на ручное управление.
Самый, пожалуй, известный мод для автоматизации полетов - это MechJeb kOS - Kerbal Operating System . Он позволяет писать программы для автоматизации практически всего и управления кораблём почти так же, как вручную, только на автомате. При установленном RemoteTech это очень удобно, поскольку можно управлять аппаратом, не имея связи с космическим центром, только последовательность команд продумать и загрузить в крафт нужно заранее.
- Введение от Finn: Часть 1 , Часть 2 , Часть 3
- Автопилоты вывода на орбиту (RSS) от Max Zomrad
- Посадочный автопилот от Iavasdemsul
- Прочие статьи по тэгу kOS
- Wiki с примерами некоторых скриптов (для устаревшей версии)
- Видеосерия Kerbal Space Programming (на английском) - сильно рекомендую для знающих язык
- Естественно, официальная страница мода
Далее предполагается, что читатель знаком с основными понятиями, такими как апоцентр, перицентр, наклонение, дельта-V, удельный импульс и т.п.
- Asteroid Day
- Cryogenic Engines
- Cryogenic Tanks
- DMagic Orbital Science
- Docking Camera (KURS)
- Kerbal Atomics
- Kerbalism
- KSP Interstellar Extended
- RealChute
- RemoteTech
- SpaceY Heavy Lifters
- Universal Storage
- USI Kolonization
- Ven's Stock Part Revamp
- Community Tech Tree
- Kerbalism
- Kerbal Engineer
- Strategia
- Unmanned before Manned
Итак, приступим.
Первая задача космической программы - запустить хоть что-нибудь хоть куда-нибудь.
В простейшем случае, у нас есть ракета, которую нужно запустить вертикально вверх. В принципе, для этого не нужен ни автопилот, ни ручное управление - достаточно поставить спиральное хвостовое оперение, и ракета при взлёте стабилизируется вращением - и тут хватило бы дельты до космоса.
Но нам всё равно придётся управлять - так что уж поуправляем.
В kOS есть два метода управления - RAW CONTROL и COOKED CONTROL. Чтобы понять первый режим, представьте езду на автомобиле в роли штурмана, если у водителя завязаны глаза.
RAW CONTROL ("сырой" контроль) - это, по сути, ввод действий, которые производит игрок вроде: "Подождать 5 сек.; нажать Z (полная тяга); нажать пробел; включить SAS; подождать 20 сек.; зажать D; подождать 1 сек.; отпустить D; . ". Работа в этом режиме нужна обычно для контроля стыковки, также можно с помощью такого контроля написать собственный алгоритм САС (здесь - Система Автоматической Стабилизации, а не аварийного спасения). Для операций взлёта, посадки и орбитального маневрирования он не очень практичен, поскольку для каждого крафта придётся писать очень сложную последовательность команд.
COOKED CONTROL ("обработанный" контроль) - это использование аналога продвинутой SAS, которой можно задать любое направление для удержания, а также можно задать необходимый уровень тяги. Аналогично стоковой САС, для поворота в заданном направлении и удержании его используется ПИД контроллер. Для пилотирования этот режим гораздо практичнее.
Пробуем управлять ракетой.
Для этого нам нужно сделать ракету, в которой есть беспилотный модуль, модуль kOS, антенна, поскольку без работающего соединения мы не можем передавать команды, и батарейка для работы всего этого богатства.

Тестовая ракета. Модуль kOS подсвечен фиолетовым.
Открываем консоль kOS для интерактивного управления.
Контроль ориентации в "обработанном" режиме производится командой
Чтобы лететь вертикально вверх, пишем
Не забываем точку в конце команды - это особенность КербоСкрипта.
Эта команда "привязывает" рулёжку к направлению "вверх".
steering - это специальная структура в kOS, которая отвечает за то, в каком направлении должен быть ориентирован аппарат.
lock - выражение, которое привязывает переменную к выражению - т.е. каждый раз, когда системе требуется значение переменной, выражение expression перевычисляется и подставляется новое значение. Другое выражение для установки значения переменной -
up - одно из предзаданных направлений, которое означает ориентацию "носом вверх" (подробнее см. ниже).
Для запуска ступени пишем
Ракета взлетает, зачем-то разворачивается на 180 градусов и летит, как положено, вверх. На 4 км, к сожалению, всё равно теряет управление, т.к. слабенькая САС в зонде не справляется. Ну и ладно, задание "запустить первый аппарат" всё равно уже выполнено.
Теперь вопрос - а где же тут автоматизация? Мы же вручную вбили все команды.
Сейчас будет.
Заходим в папку, где установлена игра. Там появилась подпапка Ships/Script. В ней мы и будем хранить наши скрипты. Создаем файл test.ks такого содержания:
Этот скрипт делает всё то, что мы делали до этого. Последняя строчка добавляет команду wait - она работает в двух режимах:
Без последней команды скрипт считается выполненным после запуска ступени, и контроль управления передаётся игроку. wait until false в данном случае не даёт программе завершиться, а автопилоту отпустить руль.
Запускаем аппарат. В консоли пишем:
Первая строчка переключает диск на номер 0. Дисковое пространство организовано так, что для каждого kOS модуля диск 0 - это "мейнфрейм ЦУП" - то, что лежит в папке Ships/Script, диск 1 - это его собственное хранилище (размер его в байтах можно посмотреть в ЦВС или в полёте по правой кнопке, изменить в ЦВС), диски 2, 3 и т.д. - другие kOS модули на том же корабле. То есть у каждого модуля, если их в корабле несколько, нумерация дисков индивидуальная.
По умолчанию бортовой компьютер работает с диска 1. Командой switch мы его переключаем на работу с другого диска. Вместо переключения на другой диск можно указывать полный путь к файлу, который надо запустить:
Естественно, доступ к диску 0 имеется только при наличии работающего соединения. В отсутствие рабочего соединения kOS может запускать только те файлы, которые хранятся на корабле. Поэтому, в идеале, перед полётом нужно скопировать на бортовую ЭВМ всё, что может понадобиться.
Этап второй. Moar Boosterz, или двухступенчатая ракета с вертикальным полётом.
Добавляем вниз разделитель и ещё один бустер. В этот раз присопливим стабилизаторы, чтобы ничего не переворачивалось.

Тестовая ракета 2. Умеет в космос.
К этой ракете уже нужна программа посложнее, поскольку в нужный момент нужно сбросить первую ступень и запустить вторую. Разберём, как это сделать.
Условные переходы и цикл с условием
Перво-наперво, нужно понять, в каком случае требуется сброс ступени. Тут есть три варианта:
а) Рассчитать время работы первой ступени. После запуска уже известной командой wait подождать это время, после чего написать команду на запуск второй ступени.
б) Отслеживать количества топлива в первой ступени и сбросить, когда его там не останется.
в) Отслеживать тягу ракеты и запускать вторую ступень, когда пропадёт тяга.
Из этих вариантов выберем третий, потому что ещё Штирлиц знал, что лучше всего запоминается последняя фраза. (На самом деле, при определении остатков топлива kOS может выдавать ненулевую цифру даже когда ступень закончила работать, а пропадание тяги фиксируется безотказно). Полностью программа полёта получается такая: после взлёта дождаться пропадания тяги, после чего запустить новую ступень.
Получить данные о тяге можно, вызвав
ship - это переменная (типа VESSEL ), в которой хранятся данные об аппарате, на котором находится активный kOS модуль. Если рядом находятся два разных корабля, имеющих kOS на борту, то для каждого из них ship будет означать текущий корабль.
ship:availablethrust даёт тягу на "полном газу" (с учётом ограничителей, выставленных в ЦВС).
Теперь запишем программу полёта двухступенчатой ракеты в виде кода:
И. к сожалению, этот код может не сработать. Например, в ракете на картинке по одной команде stage лишь сбросится первая ступень, а вторая не запустится. Чтобы этого избежать, следует проверить, появилась ли реально тяга после "пробела". Добавим условный переход:
Здесь использован условный оператор if . else , работающий практически так же, как и в большинстве других языков. Чтобы по условию выполнялась последовательность команд, её необходимо заключить в фигурные скобки. Если выполнить нужно только одну команду (как после else в примере), скобки не обязательны, но здесь оставлены для единообразия. Ожидание полсекунды в if вставлено для того, чтобы команда на разделение точно прошла - при попытке сделать две команды stage подряд можно попасть внутрь одного "тика" (цикла расчета физики в игре), и две команды обработаются как одна, чего нам не надо.
Этот код, однако, тоже может не работать, если между сбросом одной ступени и стартом другой есть ещё что-то (например, сброс обтекателя). Естественным выглядит проверка тяги в цикле. В KerboScript имеется только цикл с предусловием until . К работе его нужно привыкнуть, т.к., в отличие от while в других языках, тело цикла в KerboScript выполняется в том случае, если условие цикла не выполнено (в переводе: "пока не будет выполнено условие, повторять действие"). Поэтому программа запуска ступеней нашей двухступенчатой ракеты с циклом будет выглядеть так:
Эту программу сохраняем в файл test.ks. Управления ориентацией для разнообразия тут нет - ракета стабилизирована вращением за счёт спиралевидного оперения.
До космоса эта конструкция добирается, но чтобы добиться стабильной орбиты, нужно тягу давать и в горизонтальном направлении. Как это сделать?
Чтобы в этом разобраться, не нужно понять, что в kOS представляет собой ориентация и каким образом её можно задать. Заодно это прояснит, почему первая ракета после взлёта разворачивалась на 180 градусов вокруг оси.
Нетрадиционная ориентация
Переходим в ангар.
У каждой детали, с которой можно управлять (достуен переключатель Control from here по ПКМ), есть встроенные оси тангажа (X), рыскания (Y) и крена (Z).
Они представляют собой векторы, причём для части в ангаре по умолчанию ось крена направлена "вперёд", к выходу, ось рыскания - вверх, ось тангажа - вправо.
Получить значения этих векторов в текущий момент времени можно через
Заметим, что эти оси образуют левую тройку, а не правую - если наблюдателя поставить на "кончик" вектора Z, то кратчайший поворот, переводящий ось X в ось Y, будет по часовой стрелке, а не против. Это, например, означает, что пикирование будет задаваться через положительный тангаж, а кабрирование - через отрицательный, отака фигня, малята.
Теперь мы поняли, что у капсулы Mk1 "перед" с острого конца, "верх" там, где иллюминатор, а "право" - там, где у сидящего в ней Джебедайи находится правая рука. Заодно заметим, что в ЦВС у неповёрнутой детали ось Z направлена вверх, ось X к выходу (на восток), ось Y на юг.

Для тех, кто не знает - вот в таком положении сидит в капсуле Джебедайя.
Вывод: чтобы задать ориентацию аппарата, нужно задать три взаимно ортогональных оси, с которыми надо совместить оси аппарата. Именно это и содержит структура DIRECTION - направления трёх осей. Важные ориентации:
Внезапно возникающие вопросы: а где право у северного направления? А у верха? И как это вообще понимать?
Давайте запустим аппарат из капсулы Mk1 (лучше с учёным на борту, поможет нам разобраться), какого-нибудь беспилотного модуля, антенны и kOS модуля.
Открываем консоль, пишем:
.
Видим какое-то R(270.097,315.717,0) . А это, братцы, углы Эйлера. Это значит, что для получения ориентации на север нужно базовую тройку векторов сначала повернуть на 0 градусов вокруг оси Z, потом на 270.097 градусов вокруг старой оси X и, наконец, на 315.717 градусов вокруг старой оси Y. О как! А где эта базовая тройка векторов? И куда смотрят всё-таки оси "севера"?
Поймём сначала, как получить оси.
По аналогии с ориентацией аппарата, у любого объекта типа DIRECTION можно получить поля
Можно убедиться, что у "севера" ось Z направлена по касательной к сфере в северном направлении, X - на восток, Y - вертикально вверх.
У направления "вверх" - ось Z смотрит вертикально вверх, ось Y - на север (по касательной к сфере), ось X, таким образом, на запад.

Вот как-то так мы ориентированы относительно верха, если немного скатиться по наклонной.
Контроль ориентации.
Хорошо, про определение ориентации понятно. А как её контролировать? Вариантов много.
Первый - задать в виде вращения R(a,b,c) . Проблема в том, что неизвестно, куда направлены оси базовой системы координат, поэтому напрямую этот метод использовать не очень-то получится.
Второй - можно суммировать две ориентации - т.е. написать, например, R(10,20,30) + R(35,25,15) - получится R(45,45,45). Тоже метод так себе, потому что не очень понятно, к какому итоговому вращению такое суммирование приведёт. Исключение - добавка к любому вращению R(0,0,a) приводит к дополнительному вращению на a градусов по крену.
Третий способ - перемножение поворотов - что будет, если последовательно применить повороты в порядке справа налево.
Четвёртый способ - функция heading(dir,pitch) , которая задаёт направление с азимутом dir градусов и углом к горизонту pitch градусов. Ось Direction:upvector в этом случае выбирается так, чтобы Direction:forevector , Direction:upvector и Up:forevector лежали в одной плоскости. heading(dir,pitch) + R(0,0,roll) даст вам нужные азимут, тангаж и крен для ориентации аппарата.
Пятый способ - функция lookdirup(forevec,upvec) - с ней Direction:forevector задаётся вдоль forevec , Direction:upvector - проекция upvec на плоскость, ортогональную Direction:forevector .
Шестой способ - функция angleaxis(degrees,axisvector) - задает вращение на угол degrees вокруг оси axisvector .
Седьмой способ - функция rotatefromto(vec1,vec2) - создаёт один из поворотов, переводящих vec1 в vec2 .
Вроде бы ясно, как задать ориентацию, остался вопрос - что собой представляет исходная координатная система, которая поворачивается для задания ориентации?
Координаты и векторы
Вектор в kOS можно задать в виде V(a,b,c) .
Компоненты вектора доступны по суффиксам V:x, V:y, V:z.
Исходная координатная система задана векторами Ex = (1,0,0), Ey = (0,1,0), Ez = (0,0,1). То есть по определению
-
Сложение и вычитание
Векторы складываются по известным из школьной геометрии правилам теугольника или параллелограмма. В координатном виде в прямоугольной декартовой системе координат
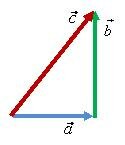
Сложение векторов: c = a + b
Из соображений производительности, если вам нужен квадрат длины, лучше пользоваться суффиксом :sqrtmagnitude
Из скалярного произведения можно вычислить косинус угла между векторами и восстановить сам угол. Это сделано уже за нас:
Проекция вектора на ось
Ортогональная составляющая вычисляется как
Тангенциальная проще всего так:
Дайте порулить
Теперь попробуем применить что-нибудь на практике.
Делаем ракету из Mk1 кабины с беспилотным командным модулем, kOS модулем и парашютом. Через разделитель прикрепляем к ней "Блоху" с крылышками. И не забудем об антенне.
Создаём файл Ships/Script/steeringtest.ks:
ракета должна автоматически взлететь, развернуться в сторону океана и приводнить капсулу.
На этом простое введение закончено. В следующей части - как выйти на орбиту.

[spoiler= Полезная информация.]Помните, что антенны довольно хрупкие штуки и длинный штырь гибкой Communotron 16 легко оторвет набегающим потоком воздуха, а вот плоская DP-10 выдержит атмосферный разгон с легкостью (главное чтоб не отгорела :) ). Вот только ей может не хватить радиуса действия… Как всегда, нужно находить компромиссы и различные технические решения, от узконаправленных антенн тарельчатого типа, до ретрансляторов, фэйрингов и проч.[/spoiler]
2.) Но кроме антенны, как вы понимаете, нужен еще и беспилотный модуль – собственно тот самый, дистанционно управляемый модуль-дрон, что «дергает за ниточки» сервомоторы нашего корабля. Самый простой – Stayputnik – можно найти в соседнем разделе «Basic Science» («Научные основы») . Стоимость 300 кербаксов за штуку, потребляет 1.7 единиц энергии в минуту (при конструировании корабля, обратите внимание на то, что у разных деталей потребление электричества зачастую указано для разных промежутков времени. Учтите это при расчете запасов и выработки электроэнергии), обладает встроенным аккумулятором в 10 единиц электроэнергии и простейшим автопилотом удержания направления.

[spoiler= Полезная информация. ]Немного забегая вперед. Впоследствии, когда ваша наука выдвинется на передовые рубежи, а мысль пронзит пространство. В общем на 6 уровне науки (тот где все по 300), в разделе «Unmanned Tech» («Беспилотные технологии») можно будет открыть перк «Probe Core Upgrade», что позволит добавить во все модули-дроны встроенную всенаправленную (подробнее о всенаправленных и узконаправленных антеннах читайте ниже в разделе "Антенны") антенну, радиусом эффективной связи в целых 3 км. Так что вы без проблем сможете строить беспилотные самолетики и кружить над KSC безо всяких антенн. Надо сказать эта фишка все же имеет практическое применение, к примеру, если запуск спутника осуществляется пилотируемой миссией (ну или беспилотной, сопровождая спутник до целевой орбиты или пункта назначения) и по замыслу (из соображений экономии денег или массы) в его конструкции антенна не предусмотрена. Первые маневры после отстыковки спутника можно будет осуществить без проблем. Но в дальнейшем, для маневрирования им, вам придется подогнать к спутнику корабль-ретранслятор.
[/spoiler]

4.) Как только вы наплодите ваших беспилотных посланников, вам потребуется расположить в системе группировку спутников (некоторые наземными станциями балуются. Так тоже можно, но я не приверженец) релейной – ретрансляторной сети, для поддержания устойчивой связи между KSC и разлетающимися по всей системе спутниками.


[spoiler= Полезная информация. ]Планируйте релейные сети заранее, во избежание «затенений» (зоны без связи. Образуются по разным причинам – недостаточный радиус антенн релейной сети, перекрытие прямой видимости объекта крупным небесным телом, неверный выбор антенны – например одна направленного типа, указывающая на конкретный объект узким лучом и не захватывающая соседние объекты), экономических потерь на дополнительные запуски новых спутников или запчастей для старых, корректировку орбит, ненужного геммороя.
[/spoiler]

А еще вы можете поиграться со значением скорости света))). Допустим вы хотите «слегка» уменьшить задержку сигнала.
Тогда укажите значение скорости света 6Е+08 – задержка сигнала уменьшится в 2 раза
Еще уменьшить? 3Е+09 – в 10 раз меньше. 3Е+10 – в 100 раз. [/spoiler] Каналы связи Наличие канала связи означает возможность командного центра (KSC или командной станции) передать управляющий сигнал адресату. Данный канал связи может быть не прямым, а быть передан через спутники-ретрансляторы опосредованно. Связи между отдельными такими спутниками в рамках терминологии мода именуются линками (links). Чтобы установить связь-линк между двумя отдельными узлами релейной сети, оба узла должны иметь на борту антенны достаточного радиуса (а в случае узконаправленных антенн, либо направлены непосредственно друг на друга, либо находиться в конусе связи тарелок). Соответственно, чтобы между командным центром и целевым беспилотным аппаратом был установлен канал связи, необходимо, чтобы от командного центра до цели прямо или опосредовано через ретрансляторы была проведена непрерывная цепь линков. Процессор (обработчик) сигнала Этим замысловатым термином в рамках модификации обзывается любой модуль, что может принимать сигнал от командного центра – в частности любой стоковый беспилотный модуль. Управлять процессором вы можете только тогда, когда между ним и командным центром установлен канал связи. Кроме того, на больших расстояниях от командного центра (свыше SOI Кербина) помните о задержке сигнала – команды будут выполняться не сразу. Однако, в процессоре также есть небольшой полетный компьютер, что может быть настроен на выполнение простых задач во время перебоев связи. Полетный компьютер Пожалуй самая сложная и интересная часть Remote Tech! Отправляя свой беспилотный аппарат исследовать космические просторы, вскоре вы обнаружите, что управлять кораблем становится все сложнее из-за возросшего времени отклика. А уж посадка, даже на близлежащую Дюну, когда от вас требуется незамедлительная реакция на ситуацию, а дрон реагирует лишь спустя пару минут, в 90% будет зафейлена. На этот случай в каждый беспилотный модуль в RT установлен простой и незамысловатый, но функциональный автопилот, именуемый «Flight Computer» («Полетный компьютер»).

Найти его можно, тыкнув по маленькой зеленой иконке калькулятора в левом верхнем углу экрана, прямо под указателями варпа и даты. Само окошко Компьютера можно условно разделить на две части: слева кнопки и пиктограммы для задания программ, справа выводятся данные о текущих маневрах (если навести указатель мыши на любую из кнопок или окошек – через пару мгновений всплывет пояснение, о назначении и использовании этого элемента). Чтобы открыть правую часть Компьютера, щелкните кнопку «>>» в правом нижнем углу окошка.
Самый элементарный способ применения – как обычно на орбитальной карте создать маневр, затем щелкнуть в Компьютере кнопку NODE – это развернет нос корабля в направлении узла маневра. Затем, щелкнуть EXEC, что даст команду Компьютеру на выполнение прожига выбранного маневра в указанное время и с указанной длительностью. Двигатель при этом должен быть запущен (тяга на нуле, естественно), ну или предварительно нужно дать команду компьютеру на запуск движка перед прожигом.
Чтобы было понятнее, как работает сия забавная штука, предлагаю рассмотреть работу Компьютера на примере посадки на планету. Стоит отметить, что хотя RT самодостаточен, какой-либо информационный мод (например Kerbal Engineer Redux, VOID или MechJeb) значительно упростит навигацию и планирование. RealChutes и SmartParts позволят заменить условия срабатывания парашютов просто по времени, на триггеры по заданной высоте.
Итак. Даже в упрощенной физической модели KSP посадка достаточно сложный процесс, требующий определенных навыков пилотирования. Чуть раньше необходимого включил двигатели, слегка перерасходовал топливо и не хватило для торможения до безопасной скорости, чуть запоздал с парашютами… Посадка обязывает пилота принимать быстрые и верные решения в реальном времени. А RT не очень-то позволяет игроку летать в реальном времени.
Посадка на атмосферные тела, конечно, проще. В нужное время выпустил парашюты и уповай на то, что инженер правильно рассчитал их количество. Так что с такой посадкой автопилот RT справляется без проблем.
Начнем. Мы на низкой орбите Кербина, у нас в руках небольшой беспилотный аппарат, связь с ним осуществляется через спутниковую сеть, но на аппарате установлены только Comms DTS-01, а значит при входе в атмосферу в активированном состоянии их оторвет. Придется антенны сложить, но в любом случае у нас возникнет потеря связи. Определяем, куда собираемся приземляться, устанавливаем точку маневра. Щелкаем NODE, а затем EXEC. Видим, что в окошке Компьютера появилось выполнение маневра и бежит счетчик времени до прожига (кстати, в нижней левой части интерфейса Компьютера, есть ползунок тяги, коим можно регулировать уровень тяги при выполнении маневра, а также окошко, в которое можно вбить конкретное значение дельты, что мы хотим прожечь. В нашем случае просто выставляем тягу на 100%).

После завершения прожига, нужно отстрелить бак с двигателем, закрыть антенны и солнечные панели, чтобы не оторвало в атмосфере, а также развернуть кораблик щитом вниз. Для этого в RT есть возможность выставить конкретную задержку выполнения действия. В правой части интерфейса, в правом нижнем углу есть небольшое окно. Вписываем туда требуемое время задержки. Допустим до маневра осталось 4 минуты. Прожиг займет около 10 секунд. Ну и прибавим секунд 30 для перестраховки. Значит в этом окошке нужно указать задержку в 280 секунд (проще вписать 4m40s – где s - секунды, m – минуты, h – часы, d – дни, w – недели, y – годы. Как выставить месяц, я не нашел. Обозначение секунд «s» указывать не обязательно. Время задержки и операции в самом Компьютере можно делать на паузе), жмем Enter. Таким образом мы установили время задержки до любой следующей команды, что мы прикажем. Это может быть включение следующей стадии, активация через экшн группу, например, раскладки солнечных панелей, включение SAS, или изменение удержания вектора. Отстрел бака и складывание деталей лучше нужно разместить на экшн группах в ангаре. В тестовом примере это 2,3,4. Последовательно нажимаем кнопки экшн групп и видим, как в интерфейсе Компьютера появляются соответствующие задачи, с выставленной задержкой в 4 минуты 40 секунд. При этом сами действия в реальном времени не происходят.

Осталось задать команду на разворот кораблика щитом в ретроград. Для этого в Компьютере есть целая панель кнопочек. Как вы видите на скрине, в интерфейсе слева есть 6 кнопок с непонятными аббревиатурами и знаками +/-, длинная кнопка Custom, а ниже еще три строчки, с возможностью вписать какие-то цифры. Это аналог стокового SAS - удержания векторов.
GRD+ - проградный вектор
GRD- - ретроградный вектор
RAD+ - радиальный вектор
RAD- - обратно радиальный вектор
NRM+ - нормальный вектор (сорри за название, не знаю как они зовутся по-русски)
NRM- - обратно нормальный вектор
Custom - возможность ручной настройки конкретного направления по трем осям в пределах 360 градусов. Здесь лучше поэкспериментировать, чтобы понять, какая ось соответствует какому направлению в игре. Как это адекватно объяснить на словах в статье я не придумал. Соответственно три нижних строчки как раз за это и отвечают.Но ведь, резонно скажете вы, направление, например, в проград относительно поверхности планеты и, скажем, относительно орбиты - есть разные вещи? Все верно. Для этого, над кнопкой Custom есть еще четыре кнопки: RVEL - отсчет относительно скорости цели, ORB - отсчет относительно орбитальной скорости, SRF - относительно планеты, TGT - проград направлен точно в цель, соответственно. По умолчанию выставляется значение ORB, так что его нужно переключить на нужное по желанию. Раз уж мы описываем кнопки, на панели еще осталась кнопка KILL - это аналог удержания направления (левый верхний "кружочек") стокового SAS. Гасит любые колебания крафта.
Итак нам нужно развернуться по ретроградному вектору (задержку пока не трогаем, пусть разворот произойдет после того, как сработают все предыдущие команды). Щелкаем "SRF", а затем "GRD-". В Компьютере появилась запись с командой на удержание ретроградного вектора, относительно поверхности планеты.
В комментариях к посту @trillobit96 спрашивал о выводе сети спутников для беспилотных запусков с модом RemoteTech. Вариантов построения такой сети достаточно, я, например, выводил спутники следующим образом.
Для начала немного математики:
Чтобы спутники имели постоянную связь друг с другом, высота их орбиты должна быть не менее 600 км, иначе сигнал будет блокироваться Кербином. При использовании Omni-антенны макс. дальность связи – 5000 км, так что высота – до 2500 км.
Так как равное время обращения спутников важнее точной высоты, то на синхронную орбиту выводить не обязательно. Поэтому рассчитывать орбиту будем, отталкиваясь от периода обращения. Общая идея такая:

Белая - целевая орбита, на ней будут висеть спутники, синяя - исходная. Запустим спутники одним носителем, выведем на исходную орбиту, затем в апоцентре будем отделять и разгонять каждый спутник по очереди до целевой орбиты. Для этого к моменту, когда носитель совершит целое число оборотов, уже выпущенные спутники должны совершить (целое + 1/3) оборотов. Тогда каждый спутник будет отставать от предыдущего на треть орбиты (120 градусов). Т.е. соотношение периодов такое (x, y - целые):

Для беспилотного запуска необходимо иметь связь с KSC в момент отделения и вывода очередного спутника, т.е. в апоцентре исходной орбиты, поэтому период исходной должен делить время обращения Кербина вокруг своей оси. В качестве исходной используем орбиту с периодом в 2 часа, тогда X = 3. Возьмем Y равным 2, тогда целевая орбита будет иметь период 2ч 34м 17,14с. Отсюда находим параметры орбит:
исходная орбита: 1371,765 х 763,437 км,
целевая - 1371,765 х 1371,765 км.
Итак, орбиты есть, можно запускать! Запускать будем это:

Да, ракета явно избыточная, но строить отдельный носитель мне было лень). Так что взял первое, что под руку попалось. Поехали!


Планируем маневр, в апоцентре потом будут выпускаться спутники.

Так как маневр будет в точке, где нет связи с KSC, то выполнение поручаем встроенному в RemoteTech автопилоту:

Следующий маневр, для выхода на исходную орбиту. Ждем пару витков, до тех пор, пока в апоцентре не появится связь с Центром:

Готово, можно выпускать.

Первый пошел! Увы, со временем запуска промазал, так что попал на ночную сторону.

Разгон спутника, корректировка периода обращения с помощью RCS. Для первого не надо стремиться к рассчитанному периоду до секунды, главное, чтобы орбита было круглой.
Для точного выставления периода необходим информационный мод - я использую MechJeb.


Ждем три витка, выпускаем второй, еще три - и третий.


Второй, третий спутники корректируем так, чтобы их периоды как можно точнее совпадали с периодом первого. Это ключевой момент всего запуска! Чем точнее совмещены периоды, тем дольше сеть прослужит без корректировки. В результате имеем такую сеть:

Всё! Носитель сводим с орбиты до красивого литоторможения.
Найдены возможные дубликаты

Kerbal Space Program
208 постов 1.3K подписчиков
Подписаться Добавить постПравила сообщества
- выкладывая свои крафты оставляйте модлист. Если включили такие моды как RO или RP-0, то требуемые для них модификации можно не писать.
- выполняйте правила Пикабу.
- опытные игроки, будьте готовы к тому что в сообществе могут быть новички. Не проявляйте агрессию, даже если что-то вам покажется "нубским".
- у нас не матерятся.
5 лет назадз.ы. простите за качество картинок - сейчас не могу переделать



Объясни, человече, зачем тебе такой огромный и уродливый обтекатель? Серьёзно, постоянно вижу в сообществе такую картину - аппарат весит полтонны, обтекатель - тонну и объёмом в три раза больше чем аппарат.
Солнечные панели спутников без корпусов - сломались бы при взлёте.
раскрыть ветку 8 5 лет назад Я не говорю о наличии обтекателя вообще. Я говорю об его уродства и неадекватности формы. Его как будто от балды лепили. раскрыть ветку 7 5 лет назад Не от балды, а чтобы ничего не торчало. Там антенна в сторону выступала, поэтому и широкий. раскрыть ветку 6 5 лет назад Если антенна вынуждает перекидывать через известно какой орган аэродинамику, вес, дельту и логику - может строит заняться реорганизацией размещения деталей?) раскрыть ветку 5 5 лет назад Конечно, но у меня носитель 60 тонн поднимал, а переделывать спутники и заново их крепить ради пары тонн, тем более в песочнице, мне как-то не улыбалось. раскрыть ветку 4 5 лет назад Достаточно просто воспользоваться гизмо поворота и антенну немного повернуть. Или просто использовать раскладную. раскрыть ветку 3 5 лет назад Можно, но некрасиво. Хотелось торчащую под 90, тут уже развернута.
Отличный пост! Вычисление периодов целевой и исходной орбиты понятно. А поясните пожалуйста, как, зная период целевой орбиты, вычислить ее высоту? И как при этом рассчитать требуемый перицентр исходной?
А то у меня беда - играю с JNSQ, по данным KER - высота геостационарной орбиты 8968,1 период - 11 ч 58 м 2 с Но нет возможности создать переходную орбиту, с необходимым апоцентром и минимально возможным перицентром период более 5 часов. Красивого треугольника не выходит. =/
раскрыть ветку 1 1 год назад 5 лет назадДавай сюда видео литоторможения :)
Видео нет, две фотки осталась)


Спасибо. Все довольно просто объяснил.
Я, на самом деле, сделал иначе. Вывожу каждый спутник отдельно, т.к. нет нужных технологий для вывода на орбиту тяжелой ракеты, а спутники взял большие, с расчетом на то, что буду их доделывать по мере открытия модулей.
Первый спутник, увы, вышел комом. Вывел на 2863 км и отстыковал ступень с топливом (топлива много, жаба душит) для маневрового двигателя. И только потом понял чего наделал. Надеюсь, что той точности орбиты хватит, чтобы спутник не уходил из зоны видимости.
раскрыть ветку 1 5 лет назадда уж, в РСС попроще - центров связи дофига по всей Земле, потому достаточно полутора спутников. :)
5 лет назад Хочу в космос показать ещё 0 комментариев Лучшие посты за сегодня 21 час назадКажется, мне немножко страшно
Вот и в моей жизни произошло событие, которое потрясло меня настолько, что я зарегистрировался Пикабу!
Я рано женился и очень быстро остался один. Это отдельная грустная история… Попереживав немножко, всего года три, взялся я как-то устраивать свою личную жизнь. На этом пути меня ждало много всякой дичи, к которой я старался относиться с юмором :)
Девушка была симпатичная. Звали ее, ну допустим Лена. Все время застолья она сидела тихо и задумчиво, больше слушала, чем говорила, что мне очень понравилось - я сам такой.
Единственным странным моментом в ее поведении была реакция на шутки – смеяться она начинала резко и громко, я даже в первый раз испугался. Жена друга периодически бросала на нее какие-то тревожные взгляды, но я списал это на то, что ей интересна реакция Лены на меня.
По прошествии нескольких дней, таким же как сейчас осенним утром, в субботу, я стою в условленном месте и жду Лену. Спустя полчаса после условленного времени она появилась. В мужской куртке не по размеру (от мужа бывшего, козла, осталась – было уточнено потом) и резиновых сапогах (мокро же, кто его знает где мы будем гулять). Меня это немного смутило, но Лена лучезарно улыбалась, и даже в этом странном наряде все равно выглядела достаточно интересно :)
Поглядев на это чудо, и прикинув, куда можно с ней пойти, я повел Лену гулять по ВДНХ – по случаю, мы как раз оказались рядом.
- Лена очень много говорит;
- Лена очень много курит;
- может остановить на скаку горящую избу и отматерить ее так, что изба не только потухнет, но и обоссавшись от страха убежит назад - туда, откуда скакала.
Мы с Леной ходили по красивым осенним дорожкам среди советской архитектуры… Она своим необычным, с хрипотцой голосом, рассказывала мне о совей нелегкой жизни, про работу, про бывшего мужа, который гад такой – сбежал к другой и вообще про всё-всё.
Я накормил ее шашлыком, которого она съела раза в три больше, чем я, и узнал, что Лена очень любит пиво, которого она так же выпила раза в три больше, чем я. Глядя как она все это уплетает, я сидел и думал, хочу ли я продолжить это знакомство?
По всему выходило, что нет. Был в ней какой-то свой необъяснимый шарм, но тормознуло меня две вещи – то, что лену вообще не интересовал я - за время нашего общения она даже не поинтересовалась, где я работаю и чем по жизни занимаюсь, общались мы в форме монолога – она говорила, я слушал. И во-вторых, то, как много она курила.
Ничего не имею против курильщиков, ну вот чисто субъективно – не выношу запаха табачного дыма, которым от Лены разило даже в тем моменты, когда она была без сигареты…
Показать полностью 21 час назадМы развлекались как могли
Вчера забавный диалог с дочкой(17 лет) получился:
- Пап а что вы делали вечерами в моём возрасте?
- Пили самогон, слушали сектор газа и стреляли из воздушки друг в друга.
- Афигеть. А зачем?
- Нуу, у нас не было интернета, мы развлекались как могли.
- Даа, жаль что у нас есть интернет.
Многие спрашивают: зачем ты тягаешь такие веса? Вот вам ответ©
22 часа назадНорма жизни
Проходил медосмотр. Психиатр спрашивает:
-есть жалобы?
-нет вроде.
-сонливость, усталость, апатия, отсутствие мотивации к работе?
-да, есть такое.
-это нормально, это у всех. Ну все, иди, не задерживай очередь.

Помощь слонику
Про мою любимую тещу
Приехали к тёще на огород помочь убраться перед зимой. Жена демонстративно молчит, поругались мы, точнее жена со мной. Я ей, как-то в шутку сказал, ты у меня как хороший мотоцикл, с пол-пинка заводишься. Зашла жена в дом, я с тестем курю, прикидываем с чего начать. Вышла моя красавица задумчивая какая-то, как пыльным мешком слегка пришибленная. Убрались, теща стол накрыла, накормила до отвала, чаем напоила, расцеловала и как обычно банками с соленьями и вареньем загрузила. Едем домой, жена молчит как то совсем уж непривычно. Доехали до дома и тут её прорвало:
-Мама даже не поздоровалась первым делом спросила, чего это такая злая, ну я ей и сказала, что поругались, да ну его нафиг, этого Rec17. Представляешь, что мне мама в ответ сказала? Ты, говорит сама дура, не надо Rec17 нервы мотать! Вот ты мне скажи, чья это мать, твоя или моя?
21 час назадНеисправимые
Жена(ж) работает в магазине. Заходит тетка покупатель(тп).
Ж: наденьте пожалуйста масочку.
Тетка с перекошеным от недовольства лицом достает из сумки зачуханую, помятую маску и мерзко бормоча одевает.
Ж: В магазине висят камеры. Заставляют чтоб все покупатели были в масках.
ТП: И правильно заставляют, у меня вон МУЖ ОТ КОРОНЫ УМЕР!
[Пост удалён]
[Содержание поста было удалено]
Комментарий администрации Пикабу.
Здравствуйте. Здесь находился пост, автор которого утверждал, что интернет-магазин Озон списал у него полмиллиона рублей без ведома владельца карт. Несмотря на то, что пост содержал весьма сомнительные пруфы (фактически их не было, кроме факта списания денежных средств), он был составлен очень грамотно, включал в себя множество упоминаний площадки для лучшей индексации в поисковиках и хорошо давил на эмоции.
На самом деле это народная забава - писать на Пикабу, когда другие способы восстановить справедливость уже на работают. И ведь Пикабу действительно помогает - нам известны истории, когда маркетплейсы решали проблемы и помогали вернуть сотни тысяч несчастным обманутым покупателям. К нам нередко обращались для того, чтобы связаться с пользователем и решить его проблему. Мы ожидали, что что-то подобное произойдёт и здесь.
Однако неожиданно с нами связались представители Озон, но заявили, что пользователь, мягко говоря, неправ. Из поста ТС мы узнали, что он не в курсе, куда и кому ушли его деньги, что он не передавал и не терял свои пароли, и что он не имеет никакого отношения к этим заказам и не имеет никакого понятия, куда эти весьма дорогие заказы едут. Ну и ещё что он много лет пользовался маркетплейсом добросовестно и всё в таком духе. Однако доказательства, представленные нам, оказались более чем исчерпывающими - история полностью выдуманна и не подкрепляется никакими фактами.
Однако на этом мы не успокоились. Потребительский экстремизм (представьте себе, есть и такое), хоть и встречается, но именно умысел и систематичность, а не глупость и наивность, нужно ещё доказать. Выяснилось, что это не первый аккаунт пользователя. И что пользователь не в первый раз "якобы" теряет деньги и разыгрывает из себя наивную пострадавшую сторону. Ранее на Пикабу этот же человек под другим аккаунтом публиковал пост: Как кукольница обманула Музей мертвых кукол, где происходило почти всё то же самое. И тем забавнее наблюдать, как автор по новому кругу принимает одни и те же советы как откровение.
Поэтому мы просим пользователей более критично относиться к тому, что пишут авторы постов. Ведь во многом из-за недобросовестных пользователей мы с вами оказываемся в ситуациях, где мы для отмены услуги или возврата денег вынуждены доказывать, что обычные пользователи не пытаются обмануть систему, а действительно потеряли деньги.
Ну и это, берегите себя и своих близких. И да, старый аккаунт блокирован за мультиакк, автора текущего поста мы ждём в комментариях, если ему есть что добавить.

До версии 1.2 в KSP связи как таковой не было. Вернее, она была всегда и везде по умолчанию: любой беспилотный аппарат всегда можно контролировать, а научные данные - передать в любой момент.
В KSP 1.2 ввели свою систему связи, немного похожую на RT (что просто шикарно). Ее затрагивать в этом посте не буду.
Ключевые моменты мода
1) для контроля над беспилотным аппаратом нужна связь с KSC (Kerbal Space Center);
2) для передачи науки всегда нужна связь с KSC;
3) сигнал, то бишь, любые команды передаются с задержкой. Скорость света, бессердечная ты сука.
4) имеет встроенный flight computer;
Не обязательно иметь прямую связь с центром. Ее можно устанавливать и через спутники-ретрансляторы.
Но связь обязательно должна быть двусторонняя. В моде в том числе моделируется и линия видимости: спутник, находящийся за горизонтом, не будет иметь связи с ровером на поверхности. В общем-то, в моде многое интуитивно понятно. Хочешь полистать Пикабу, будучи на Дюне, а у тебя на орбите болтается ретранслятор - убедись, что:
1) у тебя есть связь со ретранслятором;
2) у него есть связь с тобой;
3) у ретранслятора есть связь с KSC.
Разумеется, при наличии прямой связи с KSC ретранслятор не нужен.
Мод добавляет новые детали, а именно антенны.
Антенны делятся на два типа:
1) всенаправленные;
2) тарелки.
Основной параметр, который интересует конструктора - дальнобойность антенны. Если антенна на 5.00Мм (мегаметры), а KSC или ближайший спутник находится в 4500км - связь будет. Если же в 5100км - извини, никаких котиков на Пикабушечке.
В посте рассматриваю дефолтные настройки мода. Мод имеет несколько настроек, в том числе тип связи Root, что значительно увеличивает дальнобойность антенн. См. официальную ветку форума RT (линк в конце поста).
Все антенны можно включать и выключать. Некоторые при этом раскрываются или выдвигаются. Это можно сделать либо заранее в VAB/SPH, либо непосредственно в полете при наличии связи.
Многие антенны весьма хрупкие. Можно сравнить с солнечными панелями. Их так же может оторвать во время атмосферного полета набегающими потоками воздуха. В описании деталей этот факт отражен.
ВСЕНАПРАВЛЕННЫЕ (OMNI)


Всенаправленные антенны не требуют какой-либо настройки. Включил и забыл. Отличаются разве что дальнобойностью. Связь имеют со всем, что есть в радиусе действия.
ТАРЕЛКИ


С тарелками чуть сложнее. Их можно и нужно направлять на цель. Физическое наведение не нужно - это не моделируется ни в моде, ни в стоковой системе связи KSP 1.2.
У тарелок два параметра.
Во-первых, у них так же есть максимальная дальнобойность.
Во-вторых, также есть угол покрытия, конус.
Если тарелка направлена на корабль - она будет пытаться связаться с ним всегда. Это можно назвать "прямым режимом связи".
Если тарелка направлена на небесное тело - она будет использовать конусное покрытие и все, что попадет в конус, получит связь с тарелкой. (Разумеется, если в обратную сторону тоже есть коннект.)
Зависимость между дальнобойностью и углом покрытия обратнопропорциональная. Чем дальнобойнее тарелка, тем уже ее конус покрытия. Так что не стоит направлять тарелку на 400Гм с Кербина на Дюну. Она покроет несколько километров поверхности, поскольку имеет угол порядка 0.01°.
Например, вот так выглядит конусное покрытие Дюны от спутников на орбитах Ив и Кербина:


В данном примере любой корабль, находящийся хоть на Дюне, хоть на его спутнике Айке, получит связь.
ЗАДЕРЖКА СИГНАЛА
Чем дальше объект от точки контроля* (например, KSC), тем дольше будет идти сигнал.
К примеру, мой зонд на полюсе Ив получает команды с задержкой в 24.5 секунды:

Там же, где и указана задержка сигнала, будет написано No connection, если связи нет. К примеру, спутник-ретранслятор ушел за горизонт.
Справедливости ради стоит вспомнить, что в стоковой KSP упрощенная модель звездной системы. Хоть она и имеет аналоги реальных планет (Дюна - Марс, Ив - Венера), ее размеры, как и небесных тел примерно в 10 раз меньше реальных. Впрочем, многие параметры подкручены для придания реалистичности: Кербин при его диаметре вряд ли бы имел гравитацию в 1g, например.
В реальности свет от Солнца идет 8 минут. Задержка сигнала с роверами на Марсе - примерно полчаса. И модом RealSolarSystem (RSS) RT, разумеется, имеет реалистичные задержки.
Задержка сигнала, как и его потеря, поднимают очень интересный вопрос: а что же делать, если перед входом в атмосферу мне нужно убрать солнечные панели да и хорошо бы провести некоторые эксперименты?
На помощь приходит Flight Computer:

Открывается кнопкой с иконкой калькулятора напротив индикации связи. Жмем >> для открытия списка очереди команд. Снизу вводим задержку: на скриншоте это 2 минуты 10 секунд. Формат ввода простой: если вбито число - это считается за секунды. В противном случае нужно ставить суффиксы: s, m, h, d (секунды, минуты, часы и дни соответственно). Например: 10s20m1h1d.
Введенная задержка учитывает также и задержку сигнала. Поэтому в очереди команд мы видим Signal delay: 24s + 1m35s, поскольку у нас и так задержка сигнала - 25с.
После введения числа задержки жмем на > для ее установки. Для сброса - стираем поле и снова >. Далее все команды будут отправляться с задержкой.
Это не влияет на прямое управление кораблем (WASD) и на управление тягой.В том числе на Smart A.S.S. MechJeb'а.
Вообще Flight Computer имеет богатый набор настроек, контроля ориентации в пространстве, удержание вектора маневра и ручного прожига. Например, если наш маневр приходится на то время, когда связи не будет, можно его заранее спланировать, а затем нажать последовательно NODE для удержания вектора маневра и затем EXEC для прожига. Компьютер сам выполнит маневр.
Варнинг: он любит с этим косячить. :) Ну, возможно, косяки от других модов зависят. Думаю, я скажу за команду RemoteTech, что они ответственности за сожженные в атмосферах корабли не несут. Маневры все же лучше выполнять вручную или же доверить MechJeb'у.
Некоторые детали, в том числе модовые, имеют мобильный командный центр - т.е. могут выступать в роли KSC для беспилотников, минимизируя задержку сигнала при нахождении рядом и при наличии соответствующего экипажа.
Например, Mk1-2 Command Pod может обеспечить контроль над беспилотниками при двух условиях:
1) в капсуле есть 2 пилота;
2) беспилотниками в зоне прямой видимости (Single Hop Only);

А вот этот командный модуль имеет более широкие возможности. Он позволяет управлять любым беспилотником при наличии связи даже через ретрансляторы, но требует 3 пилота на борту.
Этот отсек из мода NearFuture Spacecraft.

В завершение покажу свой спутник-ретранслятор, покрывающий почти всю Кербольскую систему:

Этот братан обеспечивает связью лэндер на поверхности Ив на скриншоте выше. Аналогичный чувак находится и на полярной орбите Кербина.
Спутник старался сделать универсальным.
Каждая антенна имеет свою цель, так что спутник, можно сказать, покрывает почти всю Кербольскую систему. Для каждой цели бралась антенна как можно более подходящая под максимальное расстояние. То есть, если орбита Кербина вокруг Кербола - порядка 14Гм, а Ив - 10Гм, то для связи с Ив подойдет антенна на 24Гм. На таком расстоянии ее конус покроет максимальную площадь у цели.
Приведу таблицу расстояний и минимально необходимых антенн с официальной вики RemoteTech:
Речь про дальнобойность с орбиты Кербина. Расстояния приведены исходя из высоты орбиты цели + высоты орбиты Кербина.
А вот Jool - отдельный прикол.

На скриншоте - два конуса антенн на 350Gm, направленные на Jool.
Если Eeloo - сравнительно небольшой камушек и неплохо покрывается антенной на 350Gm, то систему Джула так просто одной антенной покрыть не получится. Ибо нефиг. :)
Читайте также: