
Zvs driver схема
Обновлено: 07.07.2024
Еще одна разработка которая выпала мне - это повышающий преобразователь с высоким КПД для зеленой энергетики.
- Vin nom - 50V
- Vout nom - 360V
- Pout max - 1500W
- Efficiency - >95%
- Защита от кз, превышения тока, переполюсовки входа, перегрева, повышенного/пониженного входного напряжения.
- Возможность объединения нескольких преобразователей в параллель.
Так же преобразователь должен быть компактным, и легко обслуживаемым.
Пара слов о топологии LLC
LLC топология, это резонансная топология, позволяющая получить самый высокий КПД в сравнении с другими топологиями. Высокий КПД тут получается за счет обеспечения мягкого переключения для всех силовых элементов в источнике, как для первичных транзисторов, так и для вторичного выпрямителя. Первичные транзисторы работают с мягким переключением в "нуле напряжения" - ZVS. Вторичный выпрямитель переключается в нулях тока - ZCS. Данное обстоятельство обеспечивает очень малые потери при переключении полупроводников. В результате основные потери в полупроводниках - это статичные потери проводимости.
В LLC используется ЧИМ (частотно-импульсная ) модуляция, и такой преобразователь осуществляет регулировку выходных параметров путем изменение частоты переключения на первичной стороне. При этом силовые транзисторы работают всегда с к.заполнения = 50%.
Первичный LLC контур состоит из трех элементов:
- Сr - резонансной емкости
- Lr - резонансной индуктивности
- Lm - индуктивности намагничивания силового трансформатора
Типичная схема включения для LLC - полумост:
АЧХ LLC характеризуется двумя резонансными пиками . Первая резонансная частота LLC формируется индуктивностью Lr и емкостью Cr
Вторая резонансная частота получается за счет учета индуктивности намагничивания Lm:
График АЧХ имеет примерно следующий вид:
На графике пунктирная линия разделяет рабочие области на индуктивную и емкостную зоны работы. Qe - добротность контура Lr+Cr с учетом сопротивления нагрузки. Ln - отношение Lm/Lr. Mg - к. усиления /передачи контура Lr+Cr. Для мягкой коммутации полупроводников необходимо соблюсти несколько условий:
- параметры LLC должны рассчитываться с учетом максимальной нагрузки так, чтоб рабочая точка преобразователя всегда находилась в индуктивной зоне.
- энергия накопленная в Lr на момент коммутации должна быть больше чем энергия удвоенной паразитной емкости ключей первички.
- Мертвое время между переключением ключей должно быть больше времени перезаряда паразитной емкости ключей энергией из Lr .
Рисунок поясняющий момент ZVS ниже
Рис.4. Распределение токов в момент переключения ключей. Рис.4. Распределение токов в момент переключения ключей.Транзисторы для первичной стороны стоит выбирать с минимальной емкостью Cds (сток-исток).
Первичный анализ, выбор Cr Lr Lm
Особенность передаточной хар. LLC в том что контур LrCr работает как фильтр для первички трансформатора - Lm, пропуская только первую гармонику из входного напряжения, по этой причине ток в цепи Lr Cr Lm практически всегда синусоидальной формы. Из этого так же следует что на резонансной частоте к.усиления LrCr = 1 и к первички трансформатора Lm прикладывается все входное напряжение. Если частота коммутации Fsw выше резонансной Fr, импеданс LrCr начинает расти приводя к ослаблению сигнала, к.усиления падает. Если Fsw < Fr, в резонансе начинает участвовать и Lm, в результате общий к.усиления LrLmCr растет и может быть больше 1. В таком случае напряжение развиваемое на первичке трансформатора может быть больше напряжения источника питания.
Вывод из вышесказанного:
- Для повышения напряжения на выходе LLC преобразователя - Fsw < Fr
- При номинальном Vin Vout - Fsw = Fr
- Для понижения выходного напряжения - Fsw > Fr
Основная доля расчетов преобразователя сводится к нахождению трех неизвестных: резонансной индуктивности Lr, резонансной емкости Cr и индуктивности намагничивания трансформатора ( первички) Lm
Есть множество методик нахождения этих параметров, все они описаны в апнотах производителей контроллеров для LLС.
Свой анализ я начал с нахождения минимального и максимального к.усиления LLC при минимальном и максимальном входном напряжении - Mg.

В интернете полно статей со схемами пуш-пулл, и даже тут, на Хабре, но люди не любят брать в руки паяльник, а уж тем более осцилограф.
Я же опишу схему, собранную на стандартных для ардуинщика модулях.
Из приборов необходим только тестер (да хоть DT-830), паяльник тоже нужен, но буквально на 6 точек — подключить сам излучатель и трансформатор.
Внимание! Статья содержит сцены насилия над электроникой и ненормативную лексику нестандартное использование компонентов,
поэтому если Вы радетель за чистоту науки — делайте классическую полумостовую схему, остальные — welcome под кат!
Итак, В чем сила, брат? сразу открою все карты — сердцем конструкции служит мостовой драйвер двигателей на L298N:

Да, я не открыл Америки, ибо на нем собран ультразвуковой левитатор, да и код Ардуино взят оттуда же.
Просто в данной конструкции выходы запараллелены и микросхема работает практически на пределе, у меня потребление при 20В составило 3 ампера, при четырех максимальных.
Суть же как раз в том, что схема может питать излучатель Лажевена мощностью 50-60Вт с частотой до 40кГц, и это просто!
Минус тоже есть — если что-то пойдет не так (пропадание контакта одной из сигнальных линий А0-А3), микросхема сгорит, может даже с фейерверком ;-)
Поэтому данные проводники лучше запаять, или по крайней мере использовать новые разъемные "дюпонты".
Итак, для сборки конструкции нам понадобятся следующие основные компоненты:
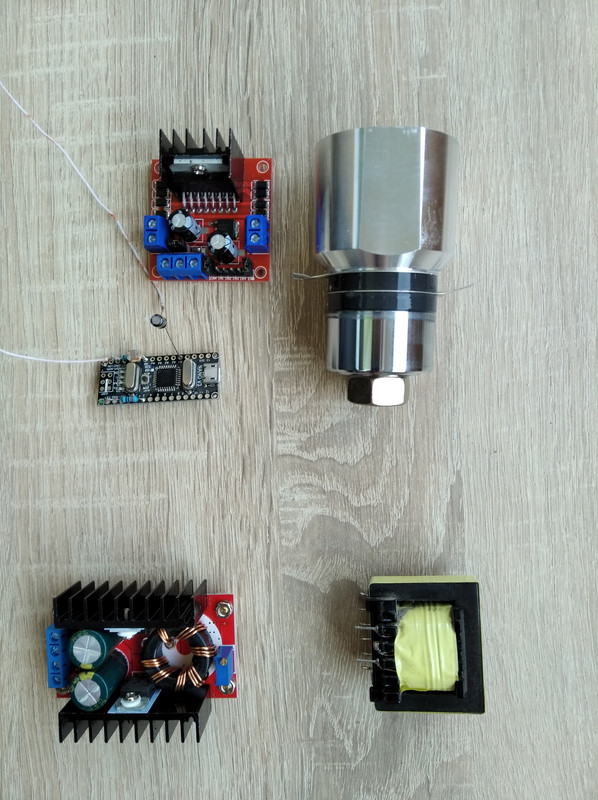
Начиная от уже знакомого нам коммутатора по часовой стрелке:
- Ультразвуковой излучатель 50-60W 28/40кГц
- Импульсный трансформатор от старого компьютерного блока питания
- Step-UP преобразователь мощностью от 100/150 Ватт
- Ардуино — по вкусу — любой на Atmega328P — Uno, Pro mini, Nano и т.д., я взял последнее просто потому, что оно было под рукой ;-)
По поводу трансформаторов — в качестве донора подойдет любой старый БП от компьютера:

Как видите, со своим я не церемонился — просто поломал печатную плату, чтобы было удобней обкусывать выводы бокорезами (ибо выпаивать без термофена неудобно).
Да, на плате обычно присутствует несколько трансформаторов, следует выбрать самый крупный.
Встречаются и трансформаторы-девочки, потому как с косичкой ;-)

В любом случае, ультразвуковой излучатель подключают к крайним выводам по стороне где 2(3) контакта, остальные следует искать, но об этом позже.
Да, еще нам потребуется вентилятор для охлаждения радиатора драйвера двигателей (из того же блока питания), и опционально вольт-амперметр:

На самом деле достаточно амперметра, включенного между преобразователем step-up и платой L298N.
Зачем? Да просто чтобы оценивать потребляемый схемой ток (чтобы не сгорела), а заодно настраивать частоту резонанса.
Последняя может "гулять" +-500Гц в зависимости от условий работы излучателя.
Схема подключений у нас следующая:
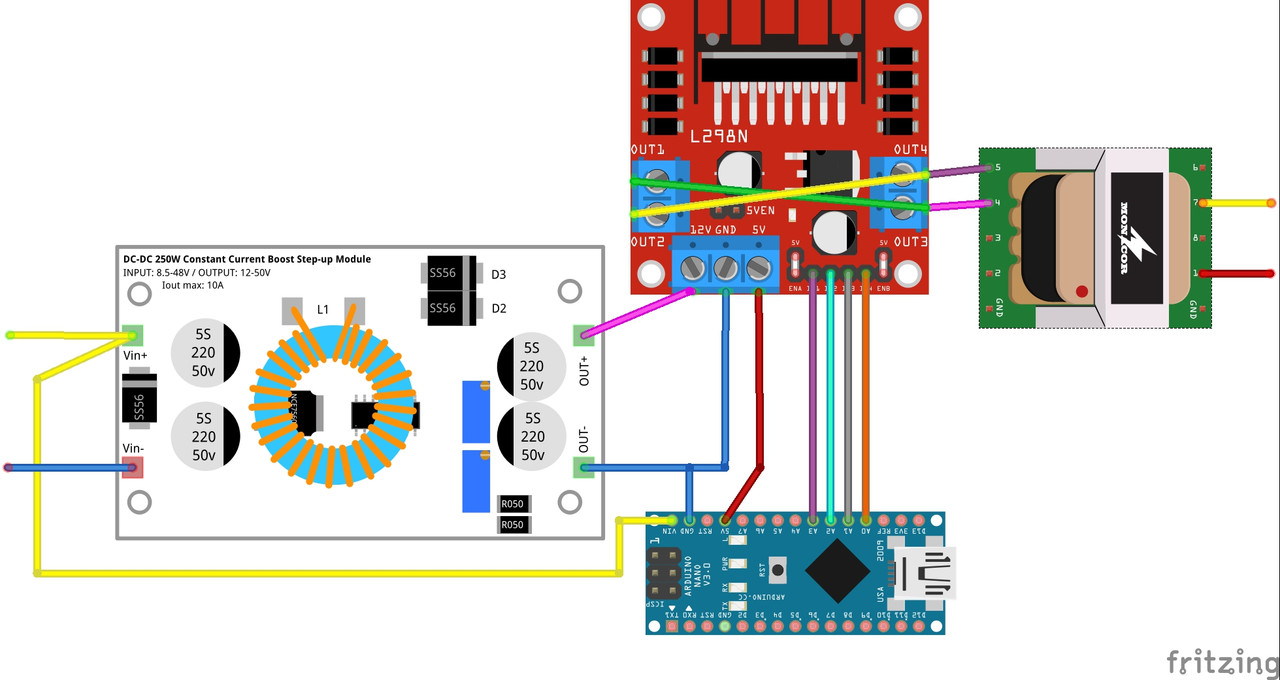
Обращаю внимание, что на плате драйвера двигателей следует снять перемычку над контактами питания (5VEN), иначе микросхема сгорит.
Выводы на двигатели ультразвуковую головку (справа и слева соединяются перекрестно) — один выход не вытягивает по мощности.
Соответственно, задействуются все четыре управляющих входа коммутатора, откуда и вытекает возможность короткого замыкания, о которой писал вначале.
Вообще-то эту операцию следует выполнять после холостого прогона с прошитым контроллером, убедившись тестером(на пределе
200V) что между соединяемыми точками нулевой потенциал.
До сборки схемы на преобразователе step-up выставляется минимальное напряжение (при питающем 12В, на выходе для начала делаем не более 14В)
Излучатель и вентилятор пока не подключаем, сначала нужно найти "правильные" обмотки трансформатора.
Для этого в Ардуино загружаем нижеследующий скетч:
Я в нем добавил одну лишь строку "OCR1A = 285;" для излучателя в 28кГц, подбор частоты — не более +-15 к указанной величине.
Все, можно включать схему(без головки) и приступить к поиску правильной обмотки:
Косичка — общий, остальные (по стороне где много выводов) — перебором — следим, чтобы радиатор коммутатора не грелся(иначе обмотка — не та) и напряжение на выходе(там, где 2/3 вывода — между крайними) было минимальным (у меня
Теперь, обесточив схему, подключаем ультразвуковой излучатель, амперметр между преобразователем напряжения и коммутатором, вентилятор.
Излучатель для настройки ставим в ванночку с водой так, чтобы черные "шайбы" были сухими.
Включив питание, подбором коэфициента OCR1A добиваемся максимального тока потребления — это и будет резонанс ультразвуковой головки.
Мощность регулируется изменением напряжения преобразователя step-up (коммутатор поддерживает до 48 Вольт).
Все, схема настроена, можно строить ультразвуковую ванну.
Ее описание приводить не буду, ибо боян, скажу лишь, что система и фольгу растворяет, и болты чистит:

Да, разница лишь в том, что я к дну емкости излучатель не клеил, а прикрутил болтом с гайкой — резьба в головке нестандартная М10х1.
Болт подошел от крепления шаровой автомобиля "Таврия", кстати с ним частота резонанса поднялась с 27500Гц до положенных 28000.
И еще, на самой головке во время резонанса напряжение составляет киловольты, поэтому следует соблюдать правила техники безопасности.
Клей не использовал по одной простой причине — во второй части расскажу о более интересных профессиях ультразвука, чем "стирать белье".
UPD!
По просьбам читателей, привожу фотографии своей "ультразвуковой ванны", собранной буквально из говна и палок канализационной заглушки и болта от Таврии ;-)
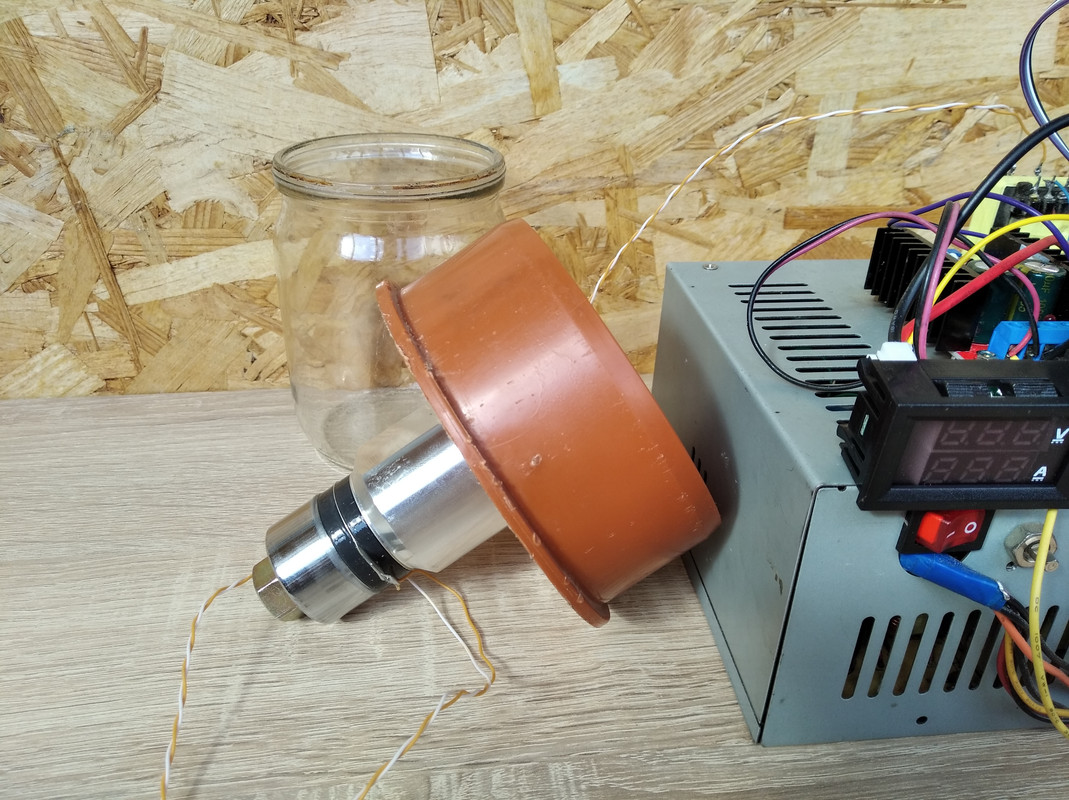
Заглушка для труб диаметром 110мм, это раз:

Крепление сделано тем самым болтом с шайбой, диаметром не менее, чем диаметр верхней части излучателя(50мм против 45), это два:

И наконец, конструкция в сборе, это три:
Да, это не столь эстетично, как скажем у HamsterTime,

зато поставив сверху отрезок пластиковой сливной трубы с уплотнителем, я смогу почистить ствол своего дробовика совершенно без усилий,
да и на излучатель у меня еще планы — собрать ультразвуковой резак, в стиле вот такого:

Ну а ультразвуковая медогонка(ради которой и городил всю затею) пока не получилась.

Основное назначение модуля — управление синхронными бесколлекторными двигателями (BLDC, BLAC, PMSM . ) с трапецеидальной или синусоидальной формой напряжения, с сенсорами скорости-положения или без сенсоров. Кроме этого модуль имеет небольшие габариты, достаточно широкий диапазон питающих напряжений, разнообразные каналы отладки, проводную и беспроводную связь.
Мощность управляемых модулем двигателей может быть в пределах нескольких сотен ватт и напряжение до 30В. Это двигатели различных механизмов и устройств, таких как: 3D-принтеры, автоматические двери, автоматические роллеты, автономные насосы, вентиляторы, замки, электроинструмент, стабилизаторы положения, моторы и сервомеханизмы RC моделей, роботов и проч.
Но этим применение модуля не ограничивается. Его можно использовать с незначительными дополнениями для управления соленоидами, шаговыми двигателями, для управления освещением, в качестве мощного зарядного устройства, как регулятор напряжения, как мощный источник аудио сигналов, как высокоамперный ключ с измерителем тока, да и просто как отладочную платформу.
Словом, такой модуль в хозяйстве инженера может быть очень полезным.
Все эти свойства модуля получаются благодаря классической 3-х фазной полумостовой схеме с датчиками тока и напряжения и производительному микроконтроллеру.

Для ускорения процесса разработки схемы силовой части был взят за основу один из типовых проектов, предлагаемых фирмой TI.
Я остановился на проекте платы TIDA-00901.

Плата обладает хорошими характеристиками: ток до 20 A, мощность двигателя до 200 Вт, номинальное напряжение 12 В. Предназначена для эксплуатации в автомобиле.
В качестве драйвера силовых ключей используется микросхема DRV8305. Некоторые поиски привели к выводу, что это одна из лучших микросхем драйверов для таких приложений.
Плата имеет специфическую круглую форму, в качестве управляющего элемента применен контроллер C2000 LaunchPad. К сожалению программное обеспечение предоставляется не полностью открытым в части библиотек управления моторами. C2000 LaunchPad выполнен на базе DSP процессора семейства F2802x Piccolo. Это семейство процессоров специализировано для разработки несложных преобразователей энергии, и не отличается большой универсальностью и объемом ресурсов.
Схема основной платы модуля


Сборка
Я собирал на макетной плате. На ней легче разместить такое немалое кол-во деталей. Конденсаторы в этой схеме надо проветривать поэтому их нельзя ставить в плотную друг к другу, а вообще по хорошему надо установить вентилятор чтобы охлаждать транзисторы и конденсаторы вместе. Также можно установить помпу и охлаждать водой нагревательную трубку.
Расчет максимальной пульсации тока и обоснование выбора фильтрующих конденсаторов
Пульсации тока непосредственно влияют на нагрев и срок службы конденсаторов в особенности электролитических. Поэтому необходимо подбирать конденсаторы по типу и номиналу, учитывая расчетный срок службы и максимальные токи.

Пользуясь этой формулой следует проверять способен ли модуль управлять данным мотором без превышения максимальных токов конденсаторов.
Как подсчитали специалисты TI при указанных на схеме конденсаторах модуль на частоте ШИМ 40 КГц может долгое время питать застопоренный мотор с током через обмотки более 80 А.
Расчет максимальной частоты переключения и обоснование выбора силовых транзисторов
Перепроверим таблицу сравнения транзисторов, предлагаемую в документе от TI. Все параметры заново выписаны из даташитов.


Здесь у меня, как и у специалистов TI выбор пал на CSD1854Q5B. По величине максимального тока это лучший выбор. А частота переключения в 122 КГц далеко уходит за разумный предел достижимый при управлении от семейства Kinetis.
Архитектура модуля.
В данном проекте решено было выполнить модуль в виде составной конструкции из 2-х плат. Основная плата содержит силовой драйвер, подсистему питания и некоторые периферийные функции. На основную плату устанавливается плата процессора. В качестве процессорной выбрана
плата проекта K66BLEZ1 (ещё статьи по этому проекту — 1, 2, 3, 4 ) с микроконтроллером семейства Kinetis фирмы NXP на базе ядра ARM Cortex-M4. (180 МГц, 2 МБ Flash память, 256 КБ ОЗУ + micro SD карта, часы реального времени с автономным питанием, USB device/host high speed, отдельный чип Bluetooth LE 4/ZigBee )
Модуль питается в диапазоне напряжений от 8.5 до 30 В. Несколько датчиков температуры — в микроконтроллере, вблизи силовых ключей и один внешний предохраняют модуль и мотор от опасных перегревов. Вся элементная база подобрана для работы при температуре до -40 град. С.
Силовые ключи управления мотором рассчитаны на ток в импульсе до 200 А. Измерение тока производится резистивными шунтами с сопротивлением 0.001 Ом. Благодаря встроенным в микросхему драйвера DRV8305 регулируемым усилителям, модуль способен измерять токи от 300 А и до 0.1 А.
Шина CAN дает возможность объединять множество подобных модулей в общую синхронизированную сеть.
Микросхема MPU-9250 полезна в случае если требуется управление ориентацией модуля в пространстве и инерциальная навигация, а также для мониторинга вибраций и ударов.
Встроенный в модуль DС-DC преобразователь с выходным напряжением 5В рассчитан на ток до 3.5 А. Сам модуль потребляет от этого преобразователя не более 150 мА, остальной запас тока может быть отдан на внешнюю нагрузку с разъема X4. Разъем X4 удобно использовать для подключения элементов освещения и индикации, таких как светодиодные RGB ленты на основе чипов WS2812B и аналогичных. Процессором аппаратно поддерживается формирование на цифровых выходах протокола кодирования бит в формате WS2812B, а также PPM, PCM, PWM кодирование. Аналогично без труда с минимальной загрузкой процессора модуль может принимать PPM и PCM сигналы.
Принцип работы
Сначала открывается 1 транзистор по нему течет ток в землю. Через диод запирается 2 транзистор. Потом он отличается и теперь уже запирается 1 транзистор. И так продолжается пока подается напряжение на входе. Эти переключения создают колебания в нагревательной катушка.
Репозиторий проекта
Все материалы относящиеся к проекту хранятся здесь.
Схема и печатная плата разработаны в среде Altium Designer 17.0.6.
В репозитории можно найти 3D модель сборки в формате STEP.
Там же лежит файл расчетов для DC-DC преобразователя на A8586 в формате Mathcad.
Сегодняшняя схема будет основана на ZVS (Zero-Voltage Switcher) драйвере. Этот драйвер будет выдавать большие токи на рабочую катушку из медной трубки(можно использовать толстую проволоку, но тогда она будет нагревается очень сильно.
Габариты

Расположение разъёмов
Вид на основную плату сверху:
Вид на основную плату снизу
Компоненты
- Транзисторы IRFP250 (можно взять IRFP260) х2
- Медная трубка от 2 до 6 мм
- Дросселя 50-70мкГн ( у меня заработало в этом диапазоне) х2
- Конденсатор 1600В 0.1мкФ х7
- Стабилитрон 12В х2
- Резистор 0.25Вт 10кОм х2
- Резистор 470Ом 2Вт х2
- Ультра быстрый диод UF4007 х2
Читайте также: