
Как заменить лопасти на квадрокоптер hubsan x4
Обновлено: 16.05.2024
Опции темы
У меня тоже не понятный результат по репитеру.1) он довольно криво настроился в поле на квадрокоптер
2) периодически терялась связь, с чем связано не понял.
3) результат уверенной видео связи 275м, но не было замера без репитера.
Вот у меня именно так же было. Все три пункта. Но стоило отключить bluetooth-джойстик, как все эти проблемы исчезли.
Вы пробовали без джойстика запускать с репитером?
Подозреваю что bluetooth с этим репитером не очень совместимо или иногда или на некоторых телефонах.
Сергей, хорошая идея, не привычно конечно будет, но попробую как только выберусь за город. Обязательно отпишусь о результатах. Как раз хотел проверить максимальное удаление полета по маршруту. Кстати вспомнил что когда то видел у китайцев джойстики на присосках для планшетов(телефонов) , может и нам пригодитсяТеоретически такая проблема совместимости может иметь место, т.к. и Wi-Fi и bluetooth работают в одном диапазоне 2.4GHz частот. ПО квадрокоптера может решает этот вопрос при соединении напрямую, а вот репитер сам выбирает каналы и в теории может помешаться. Тем более у нас с Вами репитеры двуканальные, т.е. аж два канала отнимают.еоретически такая проблема совместимости может иметь место, т.к. и Wi-Fi и bluetooth работают в одном диапазоне 2.4GHz частот. ПО квадрокоптера может решает этот вопрос при соединении напрямую, а вот репитер сам выбирает каналы и в теории может помешаться. Тем более у нас с Вами репитеры двуканальные, т.е. аж два канала отнимают. а можете обяснить идиоту:
пульт тут это джостик для телефона или полноценное передающее устройство?
я этой части не оч понял. пульт тут это джостик для телефона или полноценное передающее устройство? Непосредственно квадрокоптером управляет смартфон, т.е. он и есть пульт управления. А bluetooth- джойстик HT009 только для удобства управления, чтобы привычнее было. Он передает команды по bluetooth на смартфон.
Чуть не улетел сегодня квадр. Стал вспоминать сам процесс. В начале начался "унитазинг", но дул сильный ветер. Подумал что ветер в этом виноват. Затем попробовал полетать туда-сюда, получалось это, но плоховато. А потом нажал возврат в точку взлета. Это оказалось ошибкой - квадр разогнался до 11 м/сек и стремительно полетел от меня куда-то вправо. Не по ветру! А градусов на -90 от направления носа квадрокоптера при первоначальном взлете. Я отменил автовозврат. Затем опять нажал автовозврат, но ничего не поменялось. Квард улетел.
Получил последнюю телеметрию и стоп-кадр:
На скриншоте видно, что квадрокоптер думает что примерно направлен носом на меня (354 градуса), и стремительно летит НЕ ТУДА!
Тут ветер сдул с крыши машины репитер, и я попытался успокоится. Неспеша нашел репитер, неспеша взял его в руку и направил в сторону беглеца. И тут случилось чудо! Опять появилась телеметрия! Стало видно что квадр возвращается.
Вернулся, опять поунитазил и зацепился за дерево при автопосадке. Потом вспоминал молодость и лез за ним на высоту.
Делал скриншоты и потом просматривал трек. Совмещал с записанным видео. И вот главное - во время побега программа кардинально НЕПРАВИЛЬНО показывала направление носа квадрокоптера. На -90 градусов! И вернулся он только после того, как направление по программе стало совпадать с реальным после очередного унитазинга в крайней точке побега.
Видно что спутников 12 штук, т.е. на ошибки GPS я не думаю.
По ходу или что-то не то иногда с компасом, или унитазинг нарушил восприятие компаса с микропрограммой квадрокоптера.
Но я на этот раз повесил GPS трекер посередине корпуса, под днищем. Может быть он и нарушил компас.
Т.е. совет - периодически посматривайте на Yaw в правом нижнем углу экрана, чтобы он совпадал с реальным направлением носа квадрокоптера!
Осмотр корпуса квадрокоптера
Прежде чем разбирать квадрокоптер, посмотрите, нет ли посторонних предметов между пропеллерами и валами. Это может не влиять на работу, отражаться только на скорости и манере полета, но иногда попавшие камешки, грязь, пыль мешают винтам крутиться. Убрав посторонние предметы, квадрокоптер снова можно запускать.
Работа моторов
Неполадки в работе моторов – основная причина, почему винты перестают крутиться. Моторы требуют к себе осторожного обращения. Их нельзя резко трясти, чтобы не повредить внутренние механизмы.
В мотор могут попасть частички бытового мусора, волосы, листья, стебли растений. Засор легко удаляется пинцетом. Производители рекомендуют снять пропеллеры, чтобы не повредить их при чистке мотора.
Триммирование тоже может помочь, так как от мощности мотора зависит скорость вращения пропеллеров. (Подробно об этой процедуре должно быть написано в инструкции).

Мотор может перестать работать из-за резких движений или аварии. Выход из такой ситуации зависит от модели дрона. На некоторых беспилотниках можно заново подключить двигатель с помощью бортового компьютера. Есть модели, которые нужно разбирать, а затем вручную подключать моторы.
Однако пользователи должны помнить о возможных последствиях такого вмешательства, поскольку это может снять беспилотник с гарантии. Все зависит от места покупки, поэтому важно читать сопроводительные документы к квадрокоптеру.
✔ ХАРАКТЕРИСТИКИ
Габаритные размеры – 70х70 мм.;
Высота – 50 мм.;
Частота – 2.4Ghz;
Каналов управления – 4;
Гироскоп – шестиосевой;
Емкость аккумулятора – 240 mAh;
Дальность уверенного приема – 100 м;
Приблизительное время полета – 7-8 мин.;
Время зарядки – 30 мин.
Лопасти и валы двигателей

пропеллер и двигатели
Пропеллеры часто перестают вращаться, если установлены неправильно или плохо закреплены. Слишком слабо или сильно завинченные пропеллеры могут привести к заклиниванию мотора. Тогда винты станут вращаться с трудом.
Лопасти легко ломаются. Дрон с поврежденными винтами может вибрировать, потерять соединение с пультом управления и даже упасть. Любые изгибы или небольшие трещины могут замедлить скорость вращения пропеллеров.
Сломанные лопасти нельзя отремонтировать, лучше заменить на новые. Стоимость зависит от модели дрона, а также размеров, материала и вида винтов. По сравнению с другими частями беспилотника, пропеллеры стоят недорого. Лучше иметь под рукой запасной комплект лопастей на случай неожиданной поломки старых.
✔ ВНЕШНИЙ ВИД

Выглядит малыш достаточно симпатично, В передней части светодиоды светят синим цветом, в задней части красным. Но это только для полетов дома, на улице днем их не видно.

Пишут про достаточно прочный пластик корпуса, но это не так, пластик достаточно хрупкий и одного падения на асфальт с высоты достаточно для повреждения. Чем-то напоминает лягушку.

Передняя «глазастая» часть.

Аккумулятор прячется в нижней задней части и никак не закреплен, поэтому после сильного падения может выскочить. Моторы закреплены непосредственно в лучах, в нижней части которых надеты резиновые «ножки».

Шнурок от него можно спрятать, но есть шанс повредить корпус от усилий.

Две половинки корпуса крепятся с помощью 3 винтов в теле квадрокоптера, а на лучах защелкиваются. Эти места я рекомендую скрепить простым скотчем, так как после нескольких падений нижняя часть корпуса может выскочить из крепления в луче.
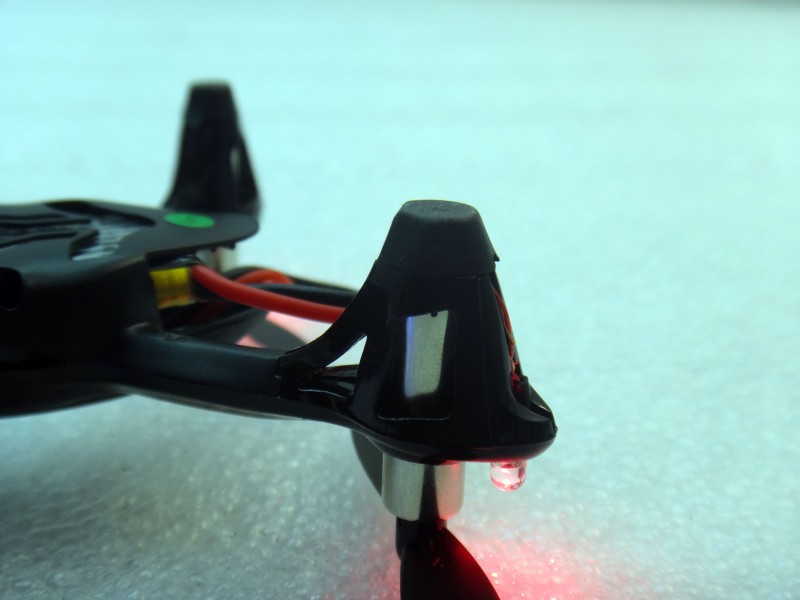
Резиновые демпферы-шасси.
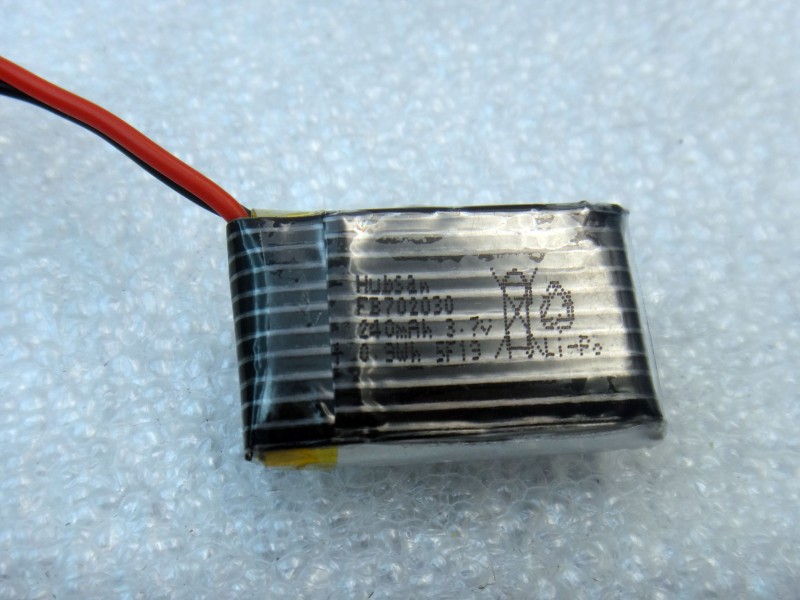
Аккумулятор емкостью в 240 mAh позволяет летать на максимальных расходах 5-7 минут, в зависимости от условий.
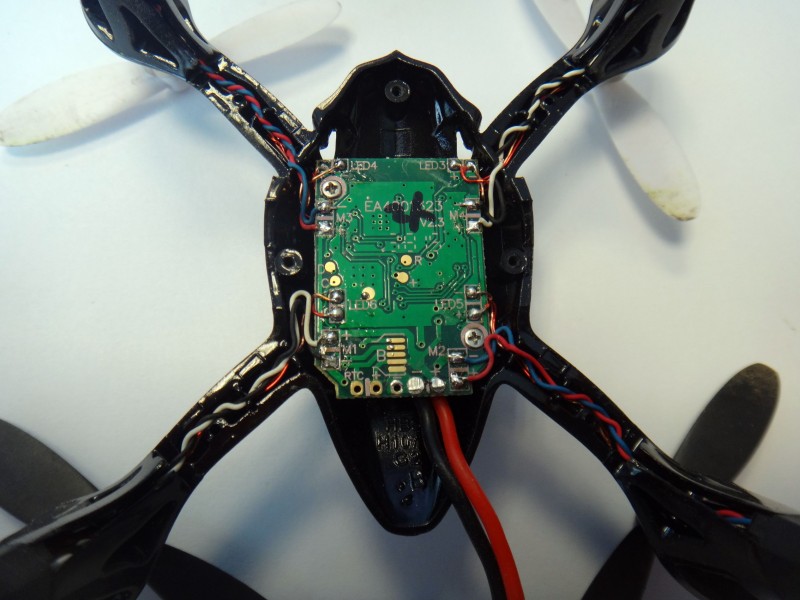
Внутри квадрокоптера, на двух винтах закреплена плата, к которой припаян разъем аккумулятора, проводочки светодиодов и провода к моторам.
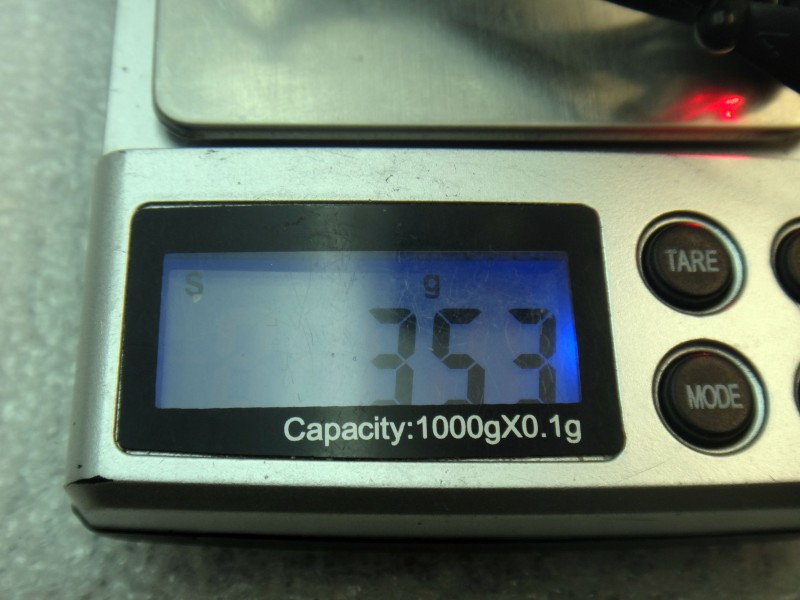
Вес квадрокоптера составляет 35.3 грамма.

Вес аккумулятора — 7.2 гр.

Ширина составляет 71 мм.

Высота 32,4 мм.

Толщина корпуса 16 мм.

Диаметр моторов 6,9 мм.
Что делать, если не вращается пропеллер квадрокоптера. Пошаговое руководство
Пропеллеры – самая уязвимая часть дрона. Все четыре винта должны исправно вращаться, чтобы квадрокоптер взлетел. Их неожиданная поломка срывает все планы по исследованию окрестностей и фотосъемке.
Пропеллеры могут вращаться медленнее или перестать работать из-за мусора или посторонних предметов, проблем с аккумулятором, проводкой, мотором, лопастями, плохой синхронизации квадрокоптера и передатчика, неправильной калибровки гирокомпаса.
Часто, сложно сказать наверняка, почему винты работают некорректно. Пошаговый осмотр квадрокоптера поможет быстро найти и устранить поломку. Представляем вам список того, на что обратить внимание, если пропеллеры перестали вращаться.

Поврежденные провода внутри или снаружи квадрокоптера
Провода хрупкие, легко могут отсоединиться, порваться после падения, или столкновения с препятствием. Разрыв провода видно на корпусе, но внутри коптера такую неполадку легко упустить. После тщательного осмотра необходимо сразу менять и надежно закреплять провода. Чем дальше расположен провод, тем сложнее заменить его и заставить винты снова работать.
Если у вас еще действует гарантия, лучше обратиться в сервис для такого типа ремонта, а не пытаться починить квадрокоптер самостоятельно – вскрытие корпуса может аннулировать гарантию производителя. Хорошо подумайте, прежде чем разбирать беспилотник дома.
✔ ПУЛЬТ УПРАВЛЕНИЯ

Пульт довольно аскетичный, никаких дополнительных кнопок, кроме триммеров и кнопки включения, нет. Присутствует светодиод, который в режиме новичка светится зеленым, а в режиме эксперта мигает красно-зеленым цветом.

Питается пульт управления 4-мя батарейками типа ААА (пальчиковые). Зарядки квадрокоптера от пульта не предусмотрено.

Все основные параметры можно контролировать на жидкокристаллическом дисплее.

Кроме того, можно зайти в режим настройки расходов или переключится в режим эксперта.
SE — режим настройки расходов для различных режимов, можно отдельно настроить для новичка и для эксперта. Удобно, когда пользоваться будут, допустим, два пилота, или один режим для дома, второй для улицы. При включении режима эксперт на дисплее высвечивается соответствующая индикация.
Основное отличие новичка от эксперта в том, что в режиме новичка квадрокоптер не будет делать флипы. Для включения режима ЭКСПЕРТ необходимо нажать на торец правого стика 1 раз. Переход в режим настроек расходов — продолжительное нажатие на правый стик, левым стиком переключение на тангаж/курс/крен.

✔ ИТОГО
В целом квадрокоптер произвел позитивное впечатление, мне понравилась его маневренность и сопротивляемость к порывам ветра. Не ожидал я от такого малыша такой прыти. Еще из понравившегося, то, что несмотря на частые и сильные падения все винты в норме, хоть падал он в траву и в кусты, обычно после нескольких таких падений в других квадрокоптерах мне бы уже пришлось менять моторы. Размеры тут на любителя в целом позволяют пилотировать и в ограниченном пространстве дома и резво летать на улице. К минусам отнесу отсутствие headless режима, так как в пространстве отличить у точки, где у нее перед, а где зад, новичку довольно сложно, светодиоды днем практически не видно. Ну и отсутствие в комплекте защиты лопастей тоже отнесу в минус, с одной стороны, защита только увеличит парусность и вес, но, с другой стороны, без нее новички быстрее угробят моторы и лопасти.
Товар предоставлен для написания обзора магазином. Обзор опубликован в соответствии с п.18 Правил сайта.
Аккумулятор
Причина некорректной работы пропеллеров может заключаться в аккумуляторе дрона. Новые батареи необходимо полностью заряжать до использования – в магазине они продаются почти разряженными. От плохой розетки, некачественного провода, батарея часто не заряжается полностью. Напряжение аккумулятора должно подходить модели беспилотника – недостаточная мощность может стать причиной плохой работы винтов. Низкого заряда батареи не хватает для полноценного полета, в этом случае индикаторы мигают, указывая, что заряда недостаточно для вращения пропеллеров.

Корректность удаленного подключения
Беспилотник синхронизируется с пультом управления, одно из ключевых условий для взлета. Пропеллеры не будут вращаться, если между квадрокоптером и контроллером слабый сигнал подключения.
Следует обратить внимание на батареи в пульте управления, особенно если их давно не меняли. Если батареи почти разрядились, это может повлиять на подключение к коптеру – винты не будут вращаться. Замена батареек пульта управления на новые с напряжением более 1,5 В должна решить эту проблему. В случае, если ПДУ на аккумуляторной батарее,то стоит убедиться в ее полной исправности.
✔ УПАКОВКА И КОМПЛЕКТАЦИЯ

Прибыл в черном кульке, картонная коробка в целях защиты была обмотанная в несколько слоев в поличтототам.
Особых фишек в этом квадрокоптере нет, поэтому пришлось рисовать флип =)

Содержимое коробки, надежно находится в своих пластиковых лотках.
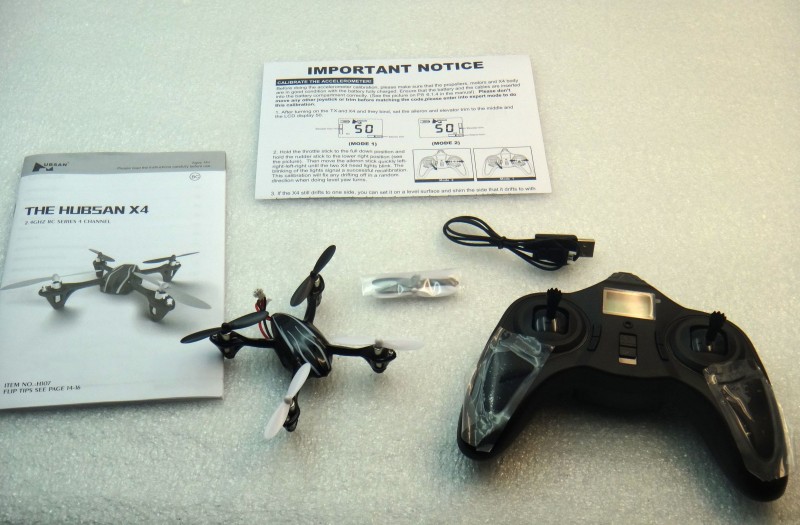
Общая комплектация небогатая, инструкция, квадрокоптер со вставленным внутрь аккумулятором, запасные лопасти, шнур для подзарядки и пульт управления.

USB кабель для зарядки.

Комплект запасных лопастей. Лопасти нехрупкие, у меня после сильного падения у меня одна лопасть согнулась, я выровнял рукой и продолжил полеты, но все равно это расходник, рекомендую прикупить пару комплектов про запас.
Инструкция достаточно подробная, но только на английском языке.
Разбираем дрон Hubsan FPV

В середине зимы мой дрон среднего уровня Hubsan X4+ FPV застрял на дереве. Несколько месяцев назад нам удалось стряхнуть его вниз (дрон, а не дерево), пока снега еще было достаточно, чтобы смягчить падение. После продолжительной зимовки выяснилось, что, в основном, все уцелело, за исключением того…, что один мотор впал в депрессию. Положительной стороной этой неприятности стало то, что у меня появился повод разобрать устройство.

Признаюсь, это не полный демонтаж. Камера разрешением 720p с платой передатчика спрятана под основной платой контроллера, и ее освобождение не требовало больших усилий, но, видимо, пожилой возраст сделал меня излишне осторожным. Устройство маленькое, и вероятно, не рассчитано на многократную разборку и сборку.
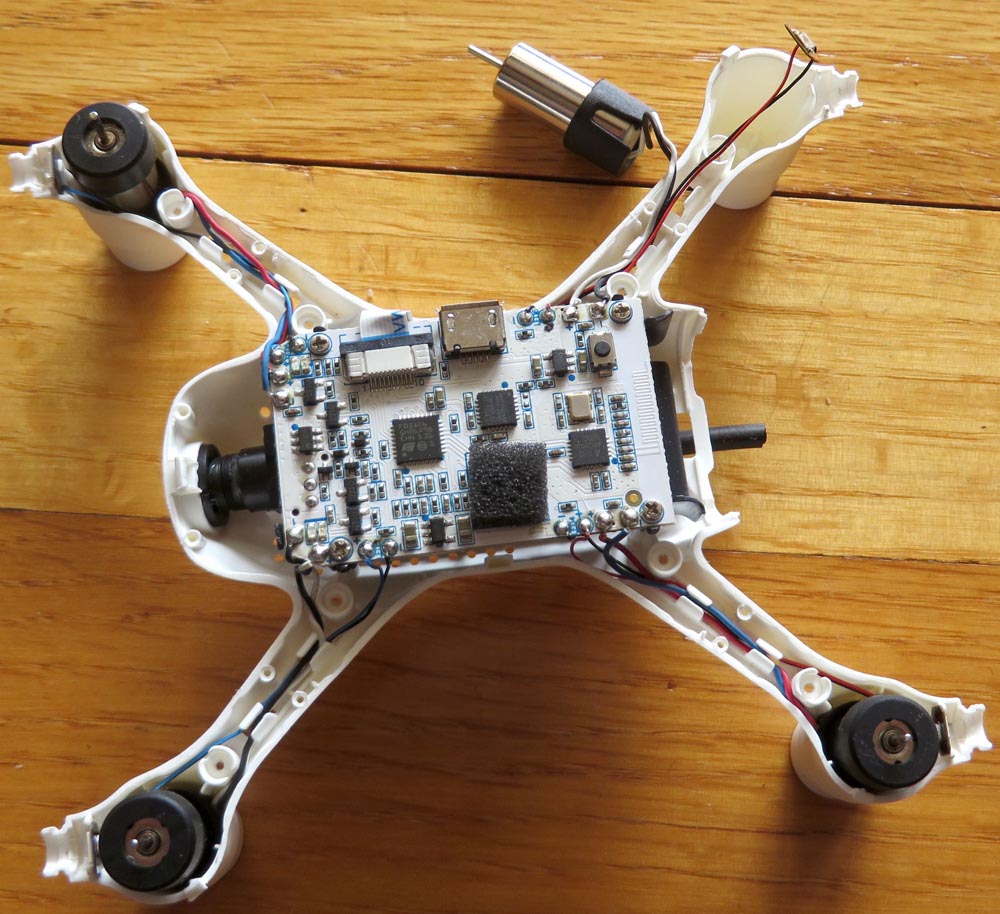 | ||
| Рисунок 1. | Дрон со снятой крышкой. Как и следовало ожидать, обычные коллекторные двигатели. Антенна видеопередатчика торчит из задней части беспилотника (на фото справа). | |
Основной процессор – это STM32F031K6 компании STMicroelectronics с ядром ARM Cortex-M0, обычным набором периферии и блоком управления моторами (самый левый большой чип на Рисунке 2). Несмотря на то, что он находится на нижней ступени иерархии ARM, нет никаких сомнений, что для этого приложения его мощности более чем достаточно.
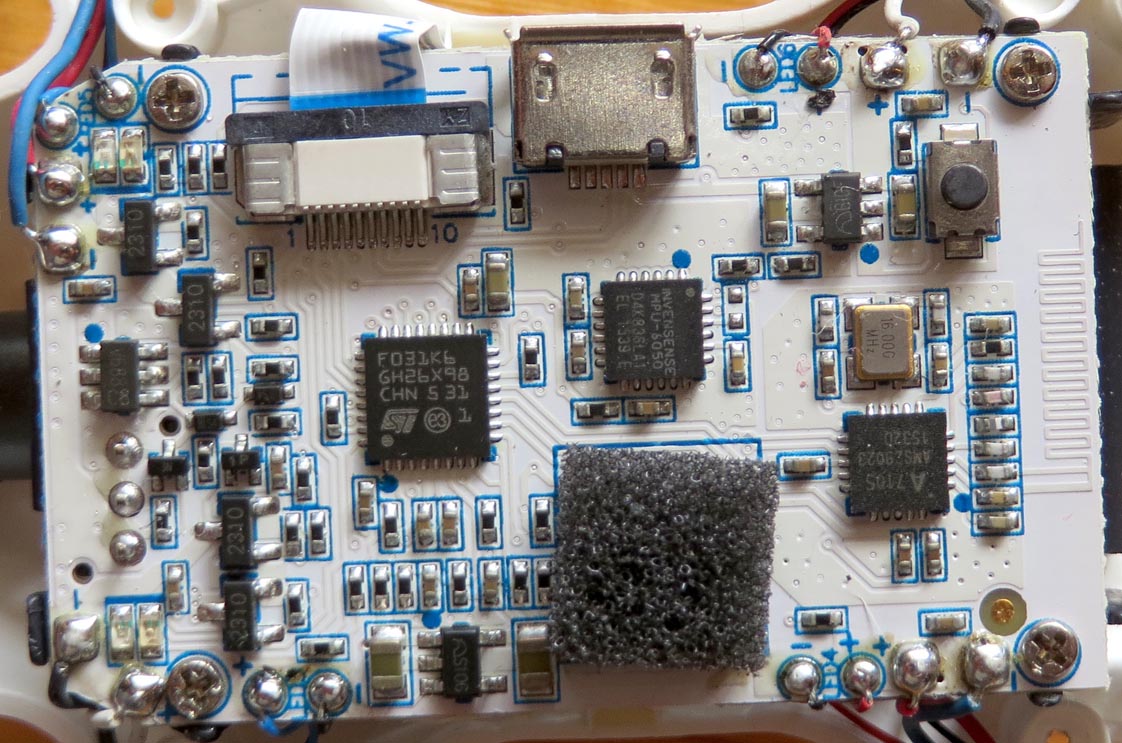 | ||
| Рисунок 2. | Основная плата. | |
Следующий важный чип – Invensense MPU-6050, в котором трехосевой гироскоп и трехосевой акселерометр объединены с процессором.
Чип №3 маркирован AMS29023, но никакой информации о нем мне найти не удалось. Хотя понятно, что это приемник команд 2.4 ГГц (видеопередатчик использует 5.8 ГГц).
Держу пари, что прикрытый пористым квадратом чип внизу платы – это датчик давления, поскольку, как утверждает Hubsan, их дрон способен поддерживать заданную высоту.
Плоский кабель наверху идет к плате камеры, а справа от него расположен слот карты microSD для записи видео и фотографий.
Переходные отверстия печатной платы смотрятся как-то странно, но, возможно, они всегда выглядят так, и вы просто не замечаете этого, когда используется более темная паяльная маска.
Что касается ремонта мотора, то никакими поглаживаниями, постукиваниями и просмотрами инструкций в YouTube его избежать не удалось. Судя по наличию многочисленных видеороликов и доступности запасных моторов, это явно не редкая поломка. Я закажу несколько моторов. И, наконец, попытаюсь прочесть полу-английскую инструкцию, прежде чем полететь опять. Надеюсь, что следующие полеты будут более успешными.
Кстати, мой самый интересный (но не самый спокойный) полет можно посмотреть по ссылке внизу.
Неисправность мотора
Если проверка батарей, лопастей, проводки, не увенчалась успехом, возможно, один из моторов сломался. В зависимости от типа поломки, неисправный мотор можно починить либо заменить на новый.
Причины поломки двигателей: повреждение монтажной опоры двигателя, воздействие влаги, неисправные подшипники, изогнутые валы. Признаками неисправности двигателя являются потеря управления, мощности, проблемы с вращением пропеллеров, сильные колебания дрона.
Потенциальных источников проблем много, но чаще всего пропеллеры не крутятся из-за незначительных причин. Независимо от проблемы, руководствуйтесь инструкцией. Консультируетесь с профессионалами, если не уверены, что в силах починить дрон.
Если советы не помогли, причина поломки может быть во внутреннем механизме квадрокоптера, особенно если это старая модель и он когда-либо падал. В таких случаях лучше обратиться в сервисный центр к специалистам.
Квадрокоптер Hubsan Х4 H107L - скоростной малыш

Хочу немного рассказать про довольно интересный квадрокоптер, для любителей «небольших» размеров, но который по маневренности и скорости почти не уступает большим братьям, и обладая двумя режимами — новичок-эксперт вполне пригоден для полетов как дома, так и на улице.
18.* — Товар предоставлен магазином…
✔ ВИДЕООБЗОР
Полеты, флипы и падения
Калибровка гирокомпаса
Читайте также: