
Что такое rndis driver
Обновлено: 20.05.2024
Remote NDIS (RNDIS) eliminates the need for hardware vendors to write an NDIS miniport device driver for a network device attached to the USB bus. Remote NDIS accomplishes this by defining a bus-independent message set and a description of how this message set operates over the USB bus. Because this Remote NDIS interface is standardized, one set of host drivers can support any number of networking devices attached to the USB bus. This significantly reduces the development burden on device manufacturers, improves the overall stability of the system because no new drivers are required, and improves the end-user experience because there are no drivers to install to support a new USB bus-connected network device. Currently Microsoft Windows provides support for Remote NDIS over USB.
The following figure shows the replacement of the device manufacturer's NDIS miniport with the combination of a Remote NDIS miniport driver and a USB transport driver. The device manufacturer can therefore concentrate on device implementation and not have to develop a Windows NDIS device driver.

Microsoft provides an NDIS miniport driver, Rndismp.sys, which implements the Remote NDIS message set and communicates with generic bus transport drivers, which in turn communicate with the appropriate bus driver. This NDIS miniport driver is implemented and maintained by Microsoft and is distributed as part of Windows.
The following Remote NDIS message set mirrors the semantics of the NDIS miniport driver interface:
Initializing, resetting, and halting device operation
Transmitting and receiving networking data packets
Setting and querying device operational parameters
Indicating media link status and monitoring device status
Microsoft also provides a USB bus transport driver that implements a mechanism for carrying the Remote NDIS messages across the USB bus. This driver transports standardized Remote NDIS messages between the Remote NDIS miniport driver and the bus-specific driver, such as USB. The bus-specific drivers are also required to map any bus-specific requirements, such as power management, into standardized Remote NDIS messages. The transport driver for USB 1.1 and 2.0 is implemented and maintained by Microsoft and distributed as part of Windows.
This structure allows a single device driver to be used for any Remote NDIS device for which there is a bus-specific transport layer. In addition, only one bus transport layer is required for all network devices on a specific bus.
STM32F4 USB RNDIS драйвер (управление устройством через Web-интерфейс)
Первым делом хотелось бы с лучшими пожеланиями поздравить всех с минувшими новогодними праздниками.
Ранее в статье была анонсирована разработка RNDIS USB драйвера для контроллеров серии STM32F4. С тех пор библиотека постепенно развивалась и нынче доросла до первой release-версии. Библиотека под названием LRNDIS (LWIP + RNDIS) позволяет нам создавать на базе контроллера STM32F4 как устройства класса USB «модем», так и любые другие устройства с управлением через web-интерфейс. Пример управления платой stm32f4-discovery из web-браузера на Android-планшете представлен на видео:

На странице видеоролика представлена ссылка на исходные коды и HEX-файл прошивки для платы discovery, с которым вы сможете повторить данный эксперимент. В статье рассказано о том, как и когда технология доступа через WEB-интерфейс полезна, а также — как работает библиотека LRNDIS для контроллеров STM32F4. Также присутствует обучающий материал о работе USB и устройстве Ethernet-сетей.
Предыстория создания библиотеки
Предыстория проекта весьма типовая. Стоял тёплый летний день. Гхм… Для заказчика стояла задача разработать устройство с сервисным интерфейсом управления.
По мере развития прошивки было введено несколько команд управления по VCP-интерфейсу. Это значит, что после подключения USB-устройства в ОС создавался виртуальный COM-порт. Используя его, из пользовательского терминала передавались команды управления и диагностики. В ответ от устройства принимался статус выполнения и его текущее состояние.
Система вполне типовая с сервисной точки зрения: есть последовательный порт и набор команд для управления и диагностики.
Всё изменилось в короткий срок. По объективным причинам рос требуемый набор команд. Также понадобилась интерактивность вывода: некоторые параметры стало необходимо отображать в динамике. Как, например, показания магнитного датчика при проносе мимо него ферромагнетика. Для этого были введены дополнительные команды, которые, оперируя управляющими последовательностями, печатали информацию в пользовательском терминале с высокой периодичностью. Это создавало необходимое ощущение риалтаймовости наблюдения. Интерактивные команды оказались настолько удобными для инженеров, что некоторая часть команд позже была добавлена в соответствии с концепцией. И тут раздался треск. Требовалось поддержать сразу несколько групп команд: интерактивные, диагностические, команды управления. При этом периодический рефакторинг кода был связан с трудоёмкой правкой в большом количестве обрабатываемых команд. Ясно стало, что ещё должна быть пользовательская группа команд — для менее квалифицированного персонала, который будет просто следовать инструкциям по эксплуатации. Для них возникла идея написания клиентского терминала с кнопочками и флажочками… И вот тут возникли сомнения: стало ясно, что мы занимаемся сервисной частью, уделяя всё меньше внимания функциональности! А ведь пользовательская программа, запускаемая на клиентской ЭВМ, также должна обладать своими требованиями: кроссплатформенность и LTS (длительностью поддержки).
Устройство, предположим, мы закончили, а пользовательское ПО мы должны портировать и тестировать с каждой версией выпускаемых операционных систем! А как долго?
Так и родился вопрос — как избавиться от дополнительных трудозатрат?
Было принято решение использовать стандарты гарантированно длительной поддержки. Те стандарты, которые нам позволят создать клиентскую программу управления устройством, которая будет поддерживаться максимально полным набором операционных систем в настоящем и будущем времени. На первых парах были найдены недостатки популярных кроссплатформенных фрэймворков:
— java: необходимость наличия в ОС JVM, и вытекающий из противного предположения необходимость дистрибьюции виртуальной машины
— qt: периодическая необходимость версионного портирования и нюансы запуска под Android.
Нет, эти сложности пугать не должны. Вопрос, пожалуй, только в трудочасах, которые мы, бывает, недооцениваем с учётом фактора длительной поддержки.

Сфера применения библиотеки
К сожалению, первый анонс в полной мере успешным не был, т.к. рассказ о сфере применения был упущен.
Попробуем немного наверстать упущенное и раскрыть эту тему.
Если мы находимся на этапе системного проектирования устройства, то следующие соображения могут склонить нас в сторону использования web-интерфейсов (вне зависимости от физического канала, Ethernet или USB):
1. Устройство должно иметь интерфейс управления и/или диагностики
2. Средства управления могут использоваться не только на этапе разработки, но и на этапе эксплуатации (ПО пользователя)
3. Квалификация пользователя может быть недостаточно высокой, что требует дружественный интерфейс управления
4. Способ «дружественного» управления должен быть доступен из под разных платформ и ОС
5. Соответствующие средства требуется поддерживать в рабочем состоянии длительное время
Дополнительным критерием может являться то, разрабатываем ли мы изначально сетевое устройство. А также: не будет ли (в противном случае) добавление в прошивку сетевого стека и web-сервера являться избыточным на фоне куда менее богатого функционала устройства. Иными словами, добавление web-интерфейса в контроллер управления лампочкой — очевидно, избыточное решение.
Если мы поверили в web-интерфейс, то следующие соображения, возможно, нам помогут в выборе физического канала связи (из Ethernet и USB перспективы).
| Тип | Внутрисхемное подключение | Типовое применение |
| Ethernet | Ethernet PHY контроллер | — Промышленные устройства — Бытовые устройства с сетевой функцией и доп. питанием |
| USB | ULPI контроллер или прямое подключение к МК | Бытовые и часть промышленных устройств. В особенности, если: — устройства имеют не гарантированный источник питания (питание от батареи, например) — устройства потенциально подключаемые к хосту только с USB интерфейсом (например, планшет) — миниатюрный класс устройств |
От себя добавлю — не смотря на все прелести, не посоветовал бы применять USB в промышленных узлах с требованием повышенной надёжности: часто встречается негативный опыт. Если альтернативы нет — то вопрос устойчивости требуется изучить досконально.
Исходя из приведённых пунктов, становится ясна сфера применения библиотеки: бытовые и часть промышленных устройств, которые:
— работают на базе МК STM32F4
— должны обладать дружественным интерфейсом управления
— должны управляться из под разного аппаратного и программного набора
— могут не иметь гарантированного источника питания
— должны иметь длительный период поддержки ПО управления
Возможных примеров использования технологии много даже вне области сугубо сетевых устройств.
К примеру, на данный момент есть планы по превращению stm32f4-discovery в инструмент любительской разработки с функциями портативного генератора/анализатора сигналов и осциллографа. Подключите такой помощник к телефону и посмотрите в динамике что происходит в интересующей вас цепи. Из бесплатных плюсов — не требуется собирать или устанавливать ПО; достаточно прошить HEX-файл и открыть браузер — в нём будут присутствовать все прелести GUI-интерфейса. На мой привередливый вкус — то что нужно. Конечно, инструмент не для профессиональной разработки, но известный интерес к нему присутствует.
Итак, надеюсь, разобрались. А теперь о том как работает библиотека.

Как оно работает
При ответе на этот вопрос спешить не будем. Человек, имеющий небольшой опыт взаимодействия с сетями, может вполне справедливо смутиться. Поэтому, касаясь того или иного протокола взаимодействия я буду также давать его краткое техническое описание на том уровне… которого когда-то не хватало самому.
Шаг 1. Подключаем USB-устройство.
Как говорилось раньше, на этом этапе наше устройство говорит хосту «я — сетевая карта!».
Хост (т.е. клиентская ЭВМ) после подключения к нему нашей поделки, начинает отправлять запросы.
— как изделие называется
— какой у изделия VID и PID (идентификаторы производителя и изделия, см. список)
— к какому классу и подклассу относится устройство
— по каким endpoint точкам и какими блоками следует обмениваться данными
Ну, и некоторую другую информацию. Конфигурационные пакеты при этом передаются по точке endpoint 0. Ответные пакеты от устройства с информацией о себе обычно называют «дескрипторы USB устройства».
Подробно ознакомиться о процессе опроса (энумерации) можно здесь.
Вообще, протокол USB достаточно богат… иногда даже кажется, что избыточно. Однако, это богатство вот уже много лет позволяет подключать совершенно разные устройства, даёт возможность передавать изохронные потоки, блоки данных, прерывания. В общем, всё необходимое, что может потребоваться широкому набору современных устройств. Обратная сторона медали — высокий порог входа в разработку USB-устройств.
После получения информации об устройстве, ОС хоста производит поиск подходящего драйвера для взаимодействия. В типовом случае, вроде flash-носителей (USB класс MSC) или клавиатуры с мышкой (HID класс), загружается стандартный для класса драйвер. В более «тяжёлом» случае, вроде нашей USB сетевой карты (CDC класс с RNDIS подклассом), операционная система поступает по усмотрению:
— ОС linux/android/mac, как правило, успешно пытается наладить типовой обмен
— ОС windows просит установить внешний драйвер
Наше устройство в первом случае работает сразу.
В случае ОС windows (позднее XP) можно установить стандартный драйвер фирмы Microsoft. Для Windows XP необходимо поставить inf-файл, доступный в репозитории библиотеки LRNDIS.
Шаг 2. Драйвер инициализирует RNDIS-устройство
На данной картинке изображён принцип связи с RNDIS устройством (ОС Windows).

Более подробно о нём можно почитать тут и там.
Если вкратце, то RNDIS протокол — это расширение NDIS для внешних устройств. Роль протокола — обеспечить поддержку PnP и обмен сетевыми пакетами. По сути своей, RNDIS — самостоятельный сетевой интерфейс, информационной нагрузкой которого являются кадры канального/сетевого уровней (Ethernet или IP кадры, опционально).
На приведённой схеме это реализует кубик «Минипорт Remote NDIS», который отвечает за:
— сервис общения (спросить у сетевого устройства его MAC-адрес, размер пакета, скорость работы и прочее)
— оборачивает отправляемые хостом сетевые пакеты в RNDIS заголовок
— транслирует принимаемые от устройства пакеты, выбрасывая RNDIS заголовок
Кубик «Минипорт Remote NDIS USB» отвечает за транзит RNDIS посылок, работая с драйвером USB шины.
На стороне контроллера STM32 за поддержку RNDIS протокола и работу с USB отвечает файл usbd_rndis_core.c. Он делает то же самое, что и «кубик» хоста «Минипорт Remote NDIS» — занимается приклеиванием/отклеиванием заголовков, а также отвечает на вопросы драйвера. Ответы, вроде MAC-адреса и скорости он берёт из файла usbd_rndis_core.h.
После успешной инициализации RNDIS драйвер Windows создаёт сетевой интерфейс, который в последствии отображается в «Центре управления сетями» и в области трей-индикатора.
Шаг 3. Получение IP-адреса
Итак, для чего нужна служба получения динамического адреса. Эта служба называется DHCP (протокол динамической настройки узла).
После того как хост инициализирует наше устройство, он создаёт сетевой интерфейс.
Сетевой интерфейс — это программная сущность, предоставляющая доступ к ресурсам физической или виртуальной сети.
Чаще всего каждому сетевому интерфейсу хоста соответствует конкретный сетевой адаптер. Но есть множество других интерфейсов, вроде локальной петли или те, что служат для взаимодействия с виртуальной машиной. В их случае в сигнальном виде из хоста «ничего не выходит» — обмен происходит программным способом.
Каждому сетевому интерфейсу хоста должен быть сопоставлен хотябы один IP-адрес. По нему «жители сети» может обратиться к хосту.
Если «на проводе» адресовано несколько сетей (например, устройства с IP адресами 10.4.1.xx и 192.168.1.xx), то интерфейсу может назначаться два «личных» IP-адреса. Они могут выглядеть так: 10.4.1.151 и 192.168.1.200. Узнать набор сетевых интерфейсов и сопоставленных им IP-адресов в ОС Windows можно с помощью команды ipconfig и с помощью ifconfig в ОС Linux.
Для описания сетей/подсетей используется маска. Например, правильное описание сети 10.4.1.xx такое: сеть 10.4.1.0, маска 255.255.255.0. Либо, если 4-ёх байтовое число маски представить в двоичном виде и посчитать число ведущих едениц, то получится значение 24. Тогда сеть можно описать так: 10.4.1.0/24.
Подробнее об этом можно почитать в соответствующих источниках.
Известны две основные стратегии назначения IP-адреса интерфейсу: статический способ (когда пользователь сам прописывает адрес интерфейсу) и динамический (с помощью DHCP-службы).
Последний заключается в том, что при создании интерфейса на хосте активизируется служба DHCP-клиента. Она начинает посылать в сеть (конфигурация которой пока не известна) широковещательные пакеты по протоколу UDP, в надежде на то, что в сети присутствует DHCP-сервер.

Функция DHCP-сервера в общем, и в частности на нашем контроллере — ответить клиенту. В ответе контроллер «говорит»: клиент, ты в такой-то сети, держи такой-то IP-адрес, а ещё у нас имеется DNS-сервер с таким-то адресом.
После этого хост «чувствует себя» намного лучше: он назначает интерфейсу выданный IP-адрес и запоминает IP-адрес DNS-сервера.
Инициализация закончилась, теперь можно вводить имя страницы (run.stm) в браузере хоста.
Надо сказать, что поведение библиотеки LRNDIS настраивается. Службу DHCP-сервера можно исключить из сборки. Тогда на хосте придётся прописывать любой адрес, принадлежащий диапазону 192.168.7.(2-254). Такая сеть создаётся по умолчанию. Её параметры (192.168.7.0/24) также настраиваются. В примере клиенту выдаются адреса в диапазоне 192.168.7.2… 192.168.7.4 с временем лизинга 24 часа.
Более подробно по вопросу настройки библиотеки можно посмотреть в предыдущей статье.
Шаг 4. Загрузка страницы
Для загрузки страницы пользователь может ввести адрес нашего устройства 192.168.7.1 напрямую.
Однако, запоминать цифры не требуется, т.к. помимо DHCP-сервера, есть возможность собрать библиотеку с поддержкой DNS-сервера, функция которого — разрешать сетевые имена. В публикуемом примере DNS-сервер обучен разрешать имя ресурса «run.stm».
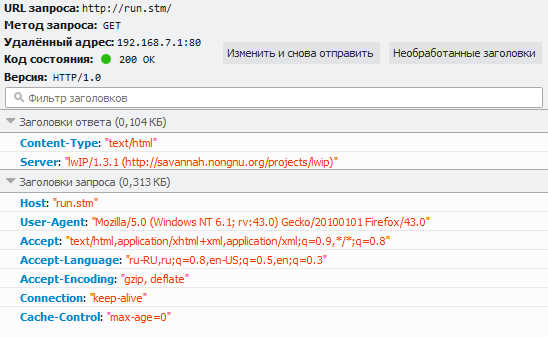
Запрос и ответ между браузером Firefox и контроллером:
История запросов при загрузке страницы:
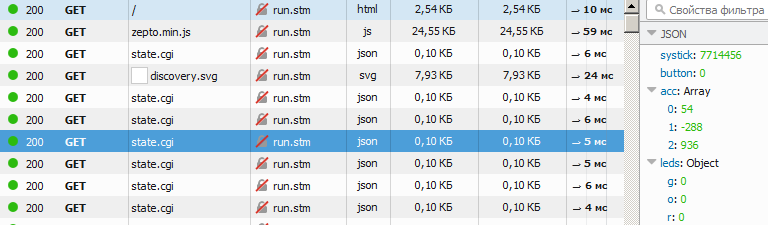
Из истории мы видим, что, после загрузки корневого HTML-документа браузер также загружает из контроллера другие два файла: discovery.svg и zepto.min.js. Первый — это изображение платы discovery. SVG формат выбран, т.к., являясь изображением векторной графики, мало занимает места в ПЗУ микроконтроллера. Скриптовый файл zepto.min.js включён, т.к. является урезанным аналогом знаменитого JQUERY. Надо заметить, что скрупулёзной экономии места в ПЗУ не производилось, т.к. не смотря на жертву в 35 Кб на все статические ресурсы, памяти контроллера ещё вполне достаточно. К тому же данный размер с дальнейшим увеличением сложности интерфейса обещает расти заметно медленней. Если же интерфейс разросся существенно — всегда есть выход хранить и отдавать статические ресурсы в сжатом виде — все известные браузеры на данный момент поддерживают декомпрессию «на лету».
Ещё один запрос, который отправляет браузер — это запрос /state.cgi. Он формируется скриптом из корневого HTML-документа с периодичностью 5 раз в секунду. Нужен запрос для получения в динамике текущего состояния устройства.
При приёме данного запроса, контроллер формирует и отвечает следующей строкой в JSON формате:
Она и содержит все данные о текущем состоянии устройства, которые впоследствии отображаются на странице средствами JavaScript кода.
Ну и, пожалуй, последний момент в общении с браузером — способ управления.
О стеке LWIP
Никакого сетевого обмена устроить бы не получилось, если бы не данный сетевой стек, который и был встроен в библиотеку.
Поскольку библиотека работает под «голым» железом (без ОС и динамической аллокации памяти), то надстройка в виде сокетов для использования недоступна. Написание сетевых приложений поэтому происходит с использованием сырого API стека. По этой теме, к счастью, в сети много информации.
В прошлой статье я давал краткое описание стека и его настройки. На данный момент был уточнён набор важных для стека определений в файле:
Также была решена проблема с mem_malloc. Хоть текущая версия прошивки и не использует динамическую аллокацию, аппаратный крах при вызове mem_malloc держал настороже. Разрешилось добавлением определения MEM_ALIGNMENT, который раньше был обойдён вниманием.
Нерешённые вопросы
1. Ньюансы релицензирования стека lwip, который может иметь свои условия включения в состав другого ПО;
2. Доработка DNS-сервера для обработки «многовопросных» пакетов;
Вместо заключения
Благодарю читателя за терпение и надеюсь, что данная статья окажется для него полезной. Опубликованная в исходных кодах библиотека LRNDIS доступна для использования на правах MIT-лицензии. Считаю замечательным, если работа, на которую было уделено ощутимое время и запас сил, окажется полезной ещё кому-то. На худой конец, без использования открытых библиотек не получилось бы и этой.
Краткий обзор драйверов спецификации NDIS
Сетевые драйверы можно разделить на 2 категории: TDI-драйверы (Transport Driver Interface) и NDIS-драйверы (Network Driver Interface Specification). TDI-драйверы — это высокоуровневые драйверы, например, SMB-клиент, SMB-сервер, обертки SMB (NFFS, MSFS) и т.п. Мы с Вами рассмотрим NDIS-драйвера. NDIS — это специальный драйвер (ему соответствует файл ndis.sys), который содержит функции, используемые низкоуровневыми сетевыми драйверами. NDIS как бы обволакивает низкоуровневые сетевые драйверы и является посредником в их общении между собой и с железом. По сути NDIS можно считать третьим ядром Windows. Чтобы более четко уяснить себе что из себя представляет NDIS можно посмтореть на следующую картинку:
- Минипорт-драйверы (драйверы адаптера)
- Промежуточные драйверы (например, psched.sys)
- Драйверы протокола (например, tcpip.sys)
Минипорт-драйверы
- производит инициализацию своего устройства (адаптера)
- создание /включение/выключение/удаление сетевых подключений
- выдача клиенту или изменение параметров адаптера
- отправка пакетов
- получение пакетов
- оповещение ОС о состоянии адаптера
- перезагрузка и остановка адаптера
Минипорт-драйверы бывают «Connectionless» (например, драйвер Ethernet-адаптера) и «Сonnection-oriented» (например, драйвер модема). У Сonnection-oriented драйверов система коллбэков чуть сложнее, в нее входят обработчики событий, связанных с подключением к каналу связи, отключением от канала, выбором канала (для беспроводных адаптеров) и т.п. Для некоторых операций Сonnection-oriented драйверы вызывают специальные функции NDIS, отличающиеся префиксом «Со» в имени (например, вместо NdisMIndicateReceivePacket Сonnection-oriented драйвер должен вызывать NdisMColndicateReceivePacket).
Каждый коллбэк выполняет свою задачу: выдача информации, отправка данных, прием данных и т.п. Подробнее можно посмотреть в хелпе к WDK (DDK). Там можно получить полную информацию о коллбэках.
Драйверы протоколов могут передоверять минипорт-драйверу (при условии, что минипорт-драйвер это умеет — либо сам, либо адаптер умеет это делать на аппаратном уровне) некоторые свои функции (например, разграничить контрольную сумму или цифровую подпись IP-пакета или принять решение, как фрагментировать большой ТСP-пакет). Это значительно повышает производитель сети.
- LBFO (Load Balancing and Fail Over) — позволяет понимающим его адаптерам распределять между собой исходящий трафик и исправлять ошибки друг друга. Впрочем, что имеет смысл только на backbone routers (центральных маршрутизаторах больших сетей), на которые редко ставят Windows
- FFP (Fast Forwarding Path) — позволяет понимающим его адаптерам маршрутизировать/фильтровать пакеты чисто аппаратно, вообще без участия ОС и не нагружая основные процессоры компьютера
Промежуточные драйверы
Промежуточный драйвер сверху виден как минипорт-драйвер (смотрим на картинку), т.е. как бы виртуальный адаптер, а снизу — как драйвер протокола (снова смотрим на картинку), как бы виртуальный протокол. Как частный случай, возможна ситуация, когда промежуточный драйвер виден только сверху.
- организуют «справедливый» доступ разных клиентских программ к адаптерам дабы программы не мешали друг другу
- фильтруют и перехватывают трафик
- маршрутизируют пакеты из одной сети в другую, если эти сети различаются (например, Ethernet и WI-FI)
Драйверы протоколов
Драйверы протокола — это самый верхний уровень спецификации NDIS. Эти драйверы занимаются тем, что выделяют ресурсы для соответствующих пакетов, копируют данные приложений в пакеты и передают их драйверам нижнего уровня. Также драйверы протоколов обеспечивают интерфейс для получения пакетов от нижележащих драйверов.
К драйверам протоколов относятся и драйверы транспорта, реализующие стек сетевых протоколов, такой как например TCP/IP (tspip.sys).
Если пост будет интересен читателям, то в следующих постах можно конкретно на примере написать свой сниферо-подобный промежуточный драйвер или также описать как написать каждый из типов драйверов (минипорта, промежуточный или протокола).
STM32F4 USB RNDIS драйвер (управление устройством через Web-интерфейс)
Первым делом хотелось бы с лучшими пожеланиями поздравить всех с минувшими новогодними праздниками.
Ранее в статье была анонсирована разработка RNDIS USB драйвера для контроллеров серии STM32F4. С тех пор библиотека постепенно развивалась и нынче доросла до первой release-версии. Библиотека под названием LRNDIS (LWIP + RNDIS) позволяет нам создавать на базе контроллера STM32F4 как устройства класса USB «модем», так и любые другие устройства с управлением через web-интерфейс. Пример управления платой stm32f4-discovery из web-браузера на Android-планшете представлен на видео:
На странице видеоролика представлена ссылка на исходные коды и HEX-файл прошивки для платы discovery, с которым вы сможете повторить данный эксперимент. В статье рассказано о том, как и когда технология доступа через WEB-интерфейс полезна, а также — как работает библиотека LRNDIS для контроллеров STM32F4. Также присутствует обучающий материал о работе USB и устройстве Ethernet-сетей.
Предыстория создания библиотеки
Предыстория проекта весьма типовая. Стоял тёплый летний день. Гхм… Для заказчика стояла задача разработать устройство с сервисным интерфейсом управления.
По мере развития прошивки было введено несколько команд управления по VCP-интерфейсу. Это значит, что после подключения USB-устройства в ОС создавался виртуальный COM-порт. Используя его, из пользовательского терминала передавались команды управления и диагностики. В ответ от устройства принимался статус выполнения и его текущее состояние.
Система вполне типовая с сервисной точки зрения: есть последовательный порт и набор команд для управления и диагностики.
Всё изменилось в короткий срок. По объективным причинам рос требуемый набор команд. Также понадобилась интерактивность вывода: некоторые параметры стало необходимо отображать в динамике. Как, например, показания магнитного датчика при проносе мимо него ферромагнетика. Для этого были введены дополнительные команды, которые, оперируя управляющими последовательностями, печатали информацию в пользовательском терминале с высокой периодичностью. Это создавало необходимое ощущение риалтаймовости наблюдения. Интерактивные команды оказались настолько удобными для инженеров, что некоторая часть команд позже была добавлена в соответствии с концепцией. И тут раздался треск. Требовалось поддержать сразу несколько групп команд: интерактивные, диагностические, команды управления. При этом периодический рефакторинг кода был связан с трудоёмкой правкой в большом количестве обрабатываемых команд. Ясно стало, что ещё должна быть пользовательская группа команд — для менее квалифицированного персонала, который будет просто следовать инструкциям по эксплуатации. Для них возникла идея написания клиентского терминала с кнопочками и флажочками… И вот тут возникли сомнения: стало ясно, что мы занимаемся сервисной частью, уделяя всё меньше внимания функциональности! А ведь пользовательская программа, запускаемая на клиентской ЭВМ, также должна обладать своими требованиями: кроссплатформенность и LTS (длительностью поддержки).
Устройство, предположим, мы закончили, а пользовательское ПО мы должны портировать и тестировать с каждой версией выпускаемых операционных систем! А как долго?
Так и родился вопрос — как избавиться от дополнительных трудозатрат?
Было принято решение использовать стандарты гарантированно длительной поддержки. Те стандарты, которые нам позволят создать клиентскую программу управления устройством, которая будет поддерживаться максимально полным набором операционных систем в настоящем и будущем времени. На первых парах были найдены недостатки популярных кроссплатформенных фрэймворков:
— java: необходимость наличия в ОС JVM, и вытекающий из противного предположения необходимость дистрибьюции виртуальной машины
— qt: периодическая необходимость версионного портирования и нюансы запуска под Android.
Нет, эти сложности пугать не должны. Вопрос, пожалуй, только в трудочасах, которые мы, бывает, недооцениваем с учётом фактора длительной поддержки.
Сфера применения библиотеки
К сожалению, первый анонс в полной мере успешным не был, т.к. рассказ о сфере применения был упущен.
Попробуем немного наверстать упущенное и раскрыть эту тему.
Если мы находимся на этапе системного проектирования устройства, то следующие соображения могут склонить нас в сторону использования web-интерфейсов (вне зависимости от физического канала, Ethernet или USB):
1. Устройство должно иметь интерфейс управления и/или диагностики
2. Средства управления могут использоваться не только на этапе разработки, но и на этапе эксплуатации (ПО пользователя)
3. Квалификация пользователя может быть недостаточно высокой, что требует дружественный интерфейс управления
4. Способ «дружественного» управления должен быть доступен из под разных платформ и ОС
5. Соответствующие средства требуется поддерживать в рабочем состоянии длительное время
Дополнительным критерием может являться то, разрабатываем ли мы изначально сетевое устройство. А также: не будет ли (в противном случае) добавление в прошивку сетевого стека и web-сервера являться избыточным на фоне куда менее богатого функционала устройства. Иными словами, добавление web-интерфейса в контроллер управления лампочкой — очевидно, избыточное решение.
Если мы поверили в web-интерфейс, то следующие соображения, возможно, нам помогут в выборе физического канала связи (из Ethernet и USB перспективы).
| Тип | Внутрисхемное подключение | Типовое применение |
| Ethernet | Ethernet PHY контроллер | — Промышленные устройства — Бытовые устройства с сетевой функцией и доп. питанием |
| USB | ULPI контроллер или прямое подключение к МК | Бытовые и часть промышленных устройств. В особенности, если: — устройства имеют не гарантированный источник питания (питание от батареи, например) — устройства потенциально подключаемые к хосту только с USB интерфейсом (например, планшет) — миниатюрный класс устройств |
От себя добавлю — не смотря на все прелести, не посоветовал бы применять USB в промышленных узлах с требованием повышенной надёжности: часто встречается негативный опыт. Если альтернативы нет — то вопрос устойчивости требуется изучить досконально.
Исходя из приведённых пунктов, становится ясна сфера применения библиотеки: бытовые и часть промышленных устройств, которые:
— работают на базе МК STM32F4
— должны обладать дружественным интерфейсом управления
— должны управляться из под разного аппаратного и программного набора
— могут не иметь гарантированного источника питания
— должны иметь длительный период поддержки ПО управления
Возможных примеров использования технологии много даже вне области сугубо сетевых устройств.
К примеру, на данный момент есть планы по превращению stm32f4-discovery в инструмент любительской разработки с функциями портативного генератора/анализатора сигналов и осциллографа. Подключите такой помощник к телефону и посмотрите в динамике что происходит в интересующей вас цепи. Из бесплатных плюсов — не требуется собирать или устанавливать ПО; достаточно прошить HEX-файл и открыть браузер — в нём будут присутствовать все прелести GUI-интерфейса. На мой привередливый вкус — то что нужно. Конечно, инструмент не для профессиональной разработки, но известный интерес к нему присутствует.
Итак, надеюсь, разобрались. А теперь о том как работает библиотека.
Как оно работает
При ответе на этот вопрос спешить не будем. Человек, имеющий небольшой опыт взаимодействия с сетями, может вполне справедливо смутиться. Поэтому, касаясь того или иного протокола взаимодействия я буду также давать его краткое техническое описание на том уровне… которого когда-то не хватало самому.
Шаг 1. Подключаем USB-устройство.
Как говорилось раньше, на этом этапе наше устройство говорит хосту «я — сетевая карта!».
Хост (т.е. клиентская ЭВМ) после подключения к нему нашей поделки, начинает отправлять запросы.
— как изделие называется
— какой у изделия VID и PID (идентификаторы производителя и изделия, см. список)
— к какому классу и подклассу относится устройство
— по каким endpoint точкам и какими блоками следует обмениваться данными
Ну, и некоторую другую информацию. Конфигурационные пакеты при этом передаются по точке endpoint 0. Ответные пакеты от устройства с информацией о себе обычно называют «дескрипторы USB устройства».
Подробно ознакомиться о процессе опроса (энумерации) можно здесь.
Вообще, протокол USB достаточно богат… иногда даже кажется, что избыточно. Однако, это богатство вот уже много лет позволяет подключать совершенно разные устройства, даёт возможность передавать изохронные потоки, блоки данных, прерывания. В общем, всё необходимое, что может потребоваться широкому набору современных устройств. Обратная сторона медали — высокий порог входа в разработку USB-устройств.
После получения информации об устройстве, ОС хоста производит поиск подходящего драйвера для взаимодействия. В типовом случае, вроде flash-носителей (USB класс MSC) или клавиатуры с мышкой (HID класс), загружается стандартный для класса драйвер. В более «тяжёлом» случае, вроде нашей USB сетевой карты (CDC класс с RNDIS подклассом), операционная система поступает по усмотрению:
— ОС linux/android/mac, как правило, успешно пытается наладить типовой обмен
— ОС windows просит установить внешний драйвер
Наше устройство в первом случае работает сразу.
В случае ОС windows (позднее XP) можно установить стандартный драйвер фирмы Microsoft. Для Windows XP необходимо поставить inf-файл, доступный в репозитории библиотеки LRNDIS.
Шаг 2. Драйвер инициализирует RNDIS-устройство
На данной картинке изображён принцип связи с RNDIS устройством (ОС Windows).
Более подробно о нём можно почитать тут и там.
Если вкратце, то RNDIS протокол — это расширение NDIS для внешних устройств. Роль протокола — обеспечить поддержку PnP и обмен сетевыми пакетами. По сути своей, RNDIS — самостоятельный сетевой интерфейс, информационной нагрузкой которого являются кадры канального/сетевого уровней (Ethernet или IP кадры, опционально).
На приведённой схеме это реализует кубик «Минипорт Remote NDIS», который отвечает за:
— сервис общения (спросить у сетевого устройства его MAC-адрес, размер пакета, скорость работы и прочее)
— оборачивает отправляемые хостом сетевые пакеты в RNDIS заголовок
— транслирует принимаемые от устройства пакеты, выбрасывая RNDIS заголовок
Кубик «Минипорт Remote NDIS USB» отвечает за транзит RNDIS посылок, работая с драйвером USB шины.
На стороне контроллера STM32 за поддержку RNDIS протокола и работу с USB отвечает файл usbd_rndis_core.c. Он делает то же самое, что и «кубик» хоста «Минипорт Remote NDIS» — занимается приклеиванием/отклеиванием заголовков, а также отвечает на вопросы драйвера. Ответы, вроде MAC-адреса и скорости он берёт из файла usbd_rndis_core.h.
После успешной инициализации RNDIS драйвер Windows создаёт сетевой интерфейс, который в последствии отображается в «Центре управления сетями» и в области трей-индикатора.
Шаг 3. Получение IP-адреса
Итак, для чего нужна служба получения динамического адреса. Эта служба называется DHCP (протокол динамической настройки узла).
После того как хост инициализирует наше устройство, он создаёт сетевой интерфейс.
Сетевой интерфейс — это программная сущность, предоставляющая доступ к ресурсам физической или виртуальной сети.
Чаще всего каждому сетевому интерфейсу хоста соответствует конкретный сетевой адаптер. Но есть множество других интерфейсов, вроде локальной петли или те, что служат для взаимодействия с виртуальной машиной. В их случае в сигнальном виде из хоста «ничего не выходит» — обмен происходит программным способом.
Каждому сетевому интерфейсу хоста должен быть сопоставлен хотябы один IP-адрес. По нему «жители сети» может обратиться к хосту.
Если «на проводе» адресовано несколько сетей (например, устройства с IP адресами 10.4.1.xx и 192.168.1.xx), то интерфейсу может назначаться два «личных» IP-адреса. Они могут выглядеть так: 10.4.1.151 и 192.168.1.200. Узнать набор сетевых интерфейсов и сопоставленных им IP-адресов в ОС Windows можно с помощью команды ipconfig и с помощью ifconfig в ОС Linux.
Для описания сетей/подсетей используется маска. Например, правильное описание сети 10.4.1.xx такое: сеть 10.4.1.0, маска 255.255.255.0. Либо, если 4-ёх байтовое число маски представить в двоичном виде и посчитать число ведущих едениц, то получится значение 24. Тогда сеть можно описать так: 10.4.1.0/24.
Подробнее об этом можно почитать в соответствующих источниках.
Известны две основные стратегии назначения IP-адреса интерфейсу: статический способ (когда пользователь сам прописывает адрес интерфейсу) и динамический (с помощью DHCP-службы).
Последний заключается в том, что при создании интерфейса на хосте активизируется служба DHCP-клиента. Она начинает посылать в сеть (конфигурация которой пока не известна) широковещательные пакеты по протоколу UDP, в надежде на то, что в сети присутствует DHCP-сервер.
Функция DHCP-сервера в общем, и в частности на нашем контроллере — ответить клиенту. В ответе контроллер «говорит»: клиент, ты в такой-то сети, держи такой-то IP-адрес, а ещё у нас имеется DNS-сервер с таким-то адресом.
После этого хост «чувствует себя» намного лучше: он назначает интерфейсу выданный IP-адрес и запоминает IP-адрес DNS-сервера.
Инициализация закончилась, теперь можно вводить имя страницы (run.stm) в браузере хоста.
Надо сказать, что поведение библиотеки LRNDIS настраивается. Службу DHCP-сервера можно исключить из сборки. Тогда на хосте придётся прописывать любой адрес, принадлежащий диапазону 192.168.7.(2-254). Такая сеть создаётся по умолчанию. Её параметры (192.168.7.0/24) также настраиваются. В примере клиенту выдаются адреса в диапазоне 192.168.7.2… 192.168.7.4 с временем лизинга 24 часа.
Более подробно по вопросу настройки библиотеки можно посмотреть в предыдущей статье.
Шаг 4. Загрузка страницы
Для загрузки страницы пользователь может ввести адрес нашего устройства 192.168.7.1 напрямую.
Однако, запоминать цифры не требуется, т.к. помимо DHCP-сервера, есть возможность собрать библиотеку с поддержкой DNS-сервера, функция которого — разрешать сетевые имена. В публикуемом примере DNS-сервер обучен разрешать имя ресурса «run.stm».
Запрос и ответ между браузером Firefox и контроллером:
История запросов при загрузке страницы:
Из истории мы видим, что, после загрузки корневого HTML-документа браузер также загружает из контроллера другие два файла: discovery.svg и zepto.min.js. Первый — это изображение платы discovery. SVG формат выбран, т.к., являясь изображением векторной графики, мало занимает места в ПЗУ микроконтроллера. Скриптовый файл zepto.min.js включён, т.к. является урезанным аналогом знаменитого JQUERY. Надо заметить, что скрупулёзной экономии места в ПЗУ не производилось, т.к. не смотря на жертву в 35 Кб на все статические ресурсы, памяти контроллера ещё вполне достаточно. К тому же данный размер с дальнейшим увеличением сложности интерфейса обещает расти заметно медленней. Если же интерфейс разросся существенно — всегда есть выход хранить и отдавать статические ресурсы в сжатом виде — все известные браузеры на данный момент поддерживают декомпрессию «на лету».
Ещё один запрос, который отправляет браузер — это запрос /state.cgi. Он формируется скриптом из корневого HTML-документа с периодичностью 5 раз в секунду. Нужен запрос для получения в динамике текущего состояния устройства.
При приёме данного запроса, контроллер формирует и отвечает следующей строкой в JSON формате:
Она и содержит все данные о текущем состоянии устройства, которые впоследствии отображаются на странице средствами JavaScript кода.
Ну и, пожалуй, последний момент в общении с браузером — способ управления.
О стеке LWIP
Никакого сетевого обмена устроить бы не получилось, если бы не данный сетевой стек, который и был встроен в библиотеку.
Поскольку библиотека работает под «голым» железом (без ОС и динамической аллокации памяти), то надстройка в виде сокетов для использования недоступна. Написание сетевых приложений поэтому происходит с использованием сырого API стека. По этой теме, к счастью, в сети много информации.
В прошлой статье я давал краткое описание стека и его настройки. На данный момент был уточнён набор важных для стека определений в файле:
Также была решена проблема с mem_malloc. Хоть текущая версия прошивки и не использует динамическую аллокацию, аппаратный крах при вызове mem_malloc держал настороже. Разрешилось добавлением определения MEM_ALIGNMENT, который раньше был обойдён вниманием.
Нерешённые вопросы
1. Ньюансы релицензирования стека lwip, который может иметь свои условия включения в состав другого ПО;
2. Доработка DNS-сервера для обработки «многовопросных» пакетов;
Вместо заключения
Благодарю читателя за терпение и надеюсь, что данная статья окажется для него полезной. Опубликованная в исходных кодах библиотека LRNDIS доступна для использования на правах MIT-лицензии. Считаю замечательным, если работа, на которую было уделено ощутимое время и запас сил, окажется полезной ещё кому-то. На худой конец, без использования открытых библиотек не получилось бы и этой.
Читайте также: